mapSignal
Map UAV flight log signal
Syntax
Description
mapSignal(
maps the signal with name mapper,signalName,timeFunc,valueFunc)signalName to a pair of function handles,
timeFunc and valueFunc. These functions define
the time stamps and values of signals from a flight log file, which can be imported using
mavlinktlog or
ulogreader. For a
list of preconfigured signals and plots, see Predefined Signals and Predefined Plots.
mapSignal(
maps the signal with name mapper,signalName,timeFunc,valueFunc,varNames)signalName and specifies the variable names,
varName, for the columns of a matrix generated from
valueFunc.
Input Arguments
More About
After mapping signals to the list of predefined signals, you can use specific predefined plots
with the show object
function. To view a list of available plots and their associated signals for a
flightLogSignalMapping object, use the info object
function. If you want to define custom plots based on signals, use the updatePlot
object function.
Each predefined plot has a set of required signals that it must map.
Predefined Plots
| Plot | Description | Signals |
|---|---|---|
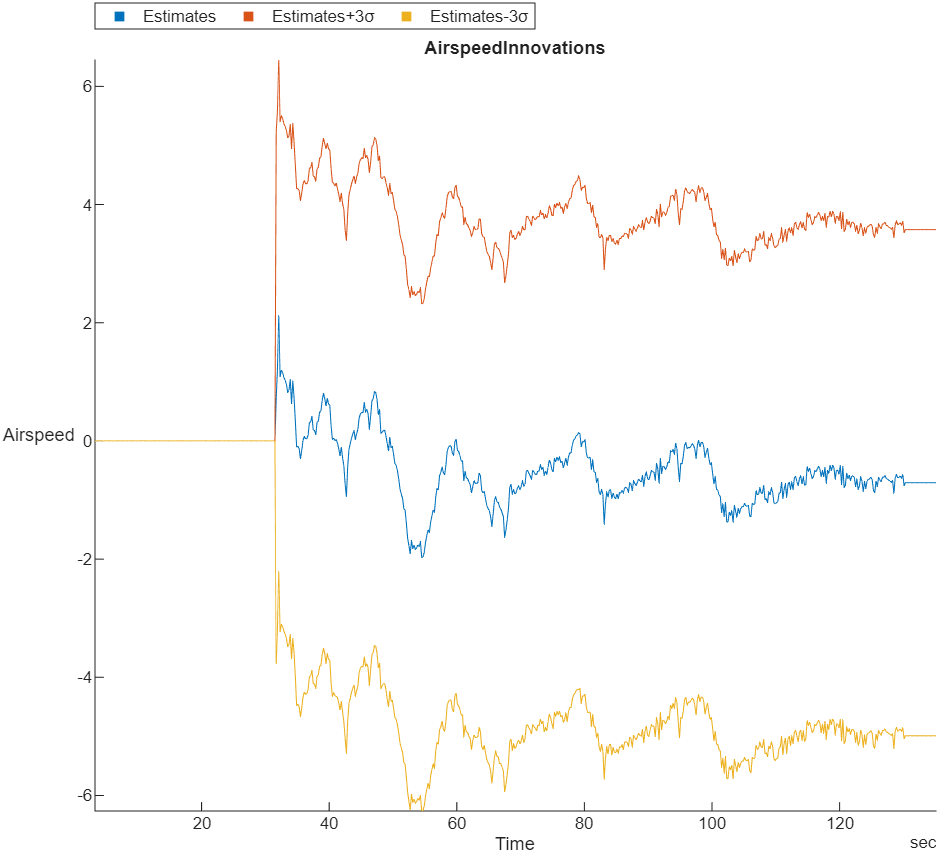
| Extended Kalman Filter (EKF) airspeed innovation and innovation variance | EstimatorInnovationAirspeed |
| Stacked plot of roll, pitch, and yaw angles and body rotation rates | AttitudeEuler, AttitudeRate, Gyro# |
| Estimated attitude of the UAV and the attitude target set point | AttitudeEuler, AttitudeTargetEuler |
| Stacked plot of battery voltage | Battery |
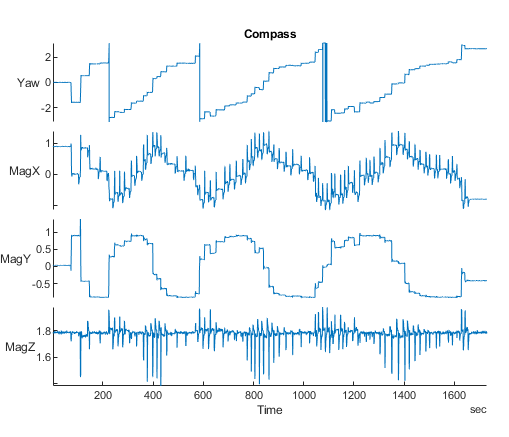
| Estimated yaw and magnetometer readings | AttitudeEuler, Mag#, GPS# |
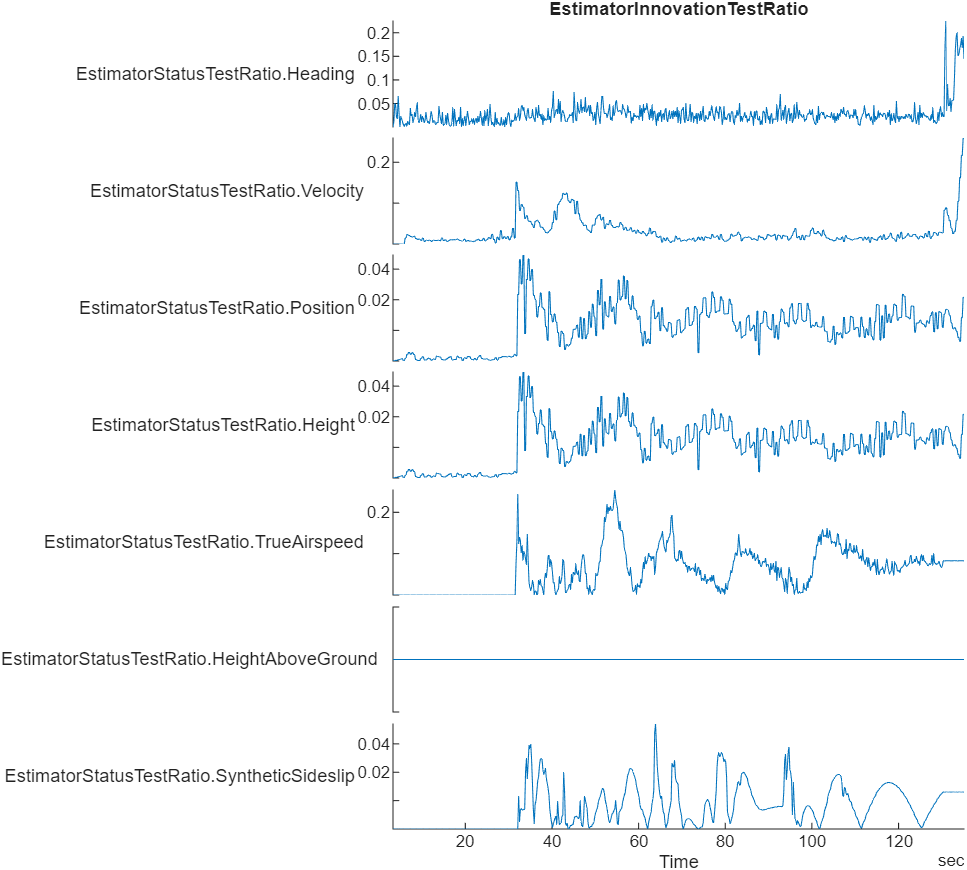
| Stacked plot of the ratio of the largest EKF innovation to the innovation test limit | EstimatorStatusTestRatio |
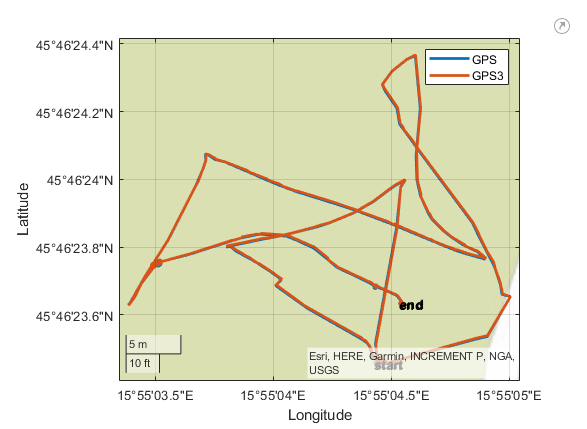
| Raw Lat-Lon plot for GPS sensor readings | GPS# |
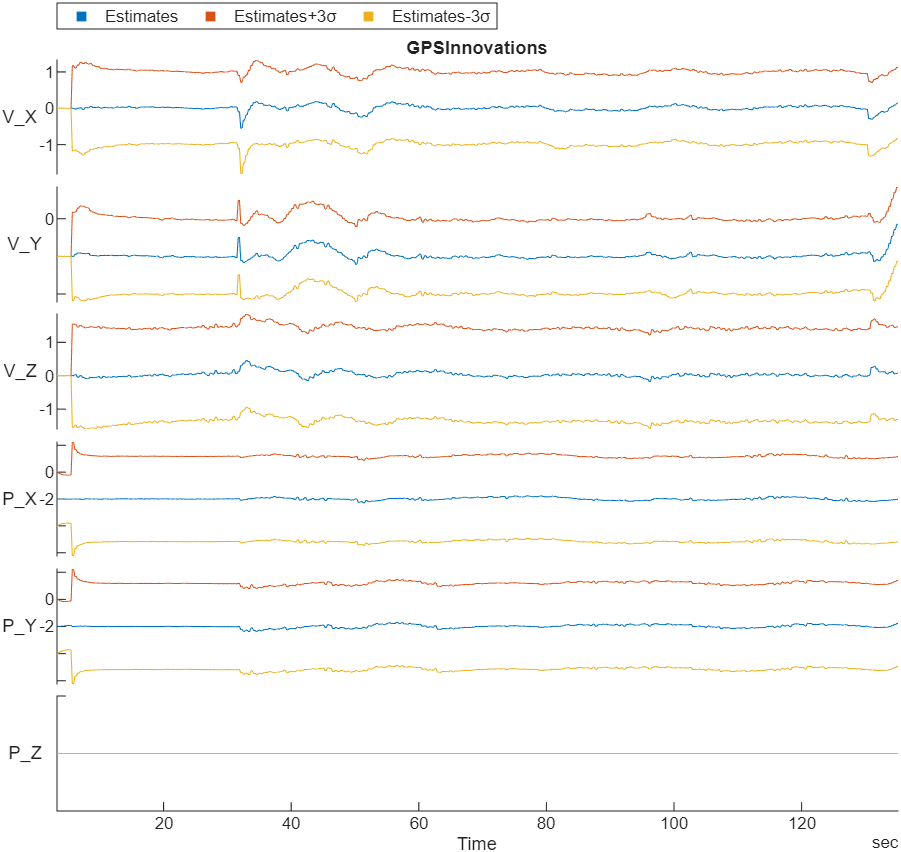
| Stacked plot of EKF GPS velocity and position innovations, and innovation variances | EstimatorInnovationGPS |
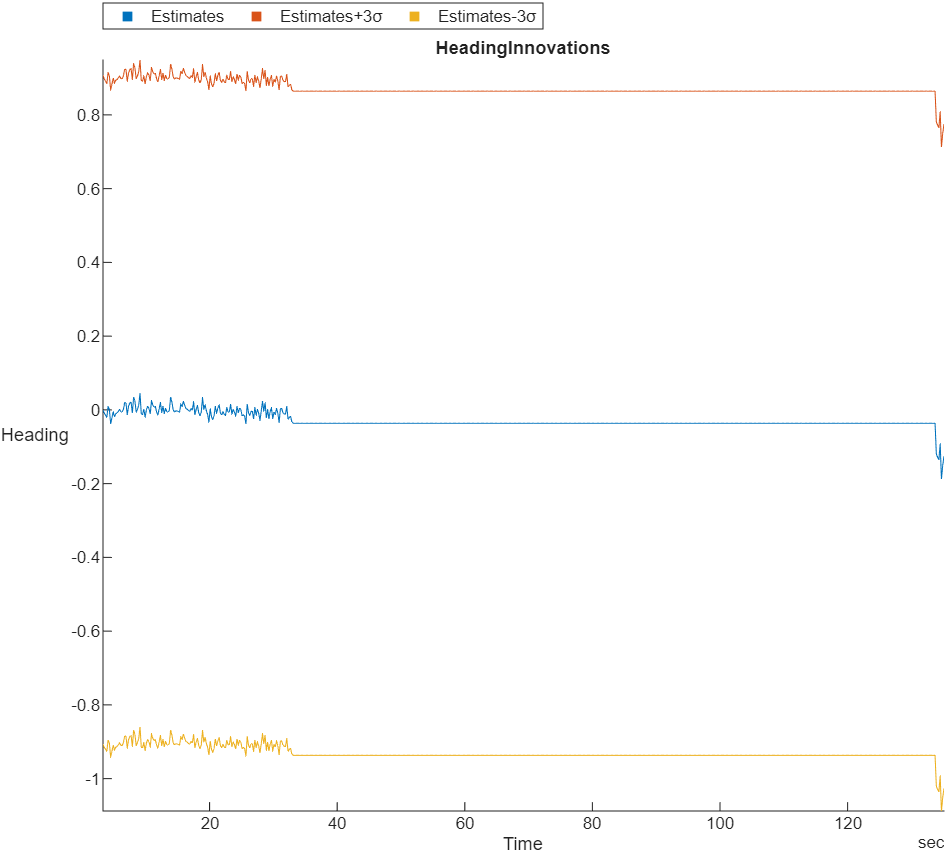
| Stacked plot of EKF heading innovation and innovation variance | EstimatorInnovationHeading |
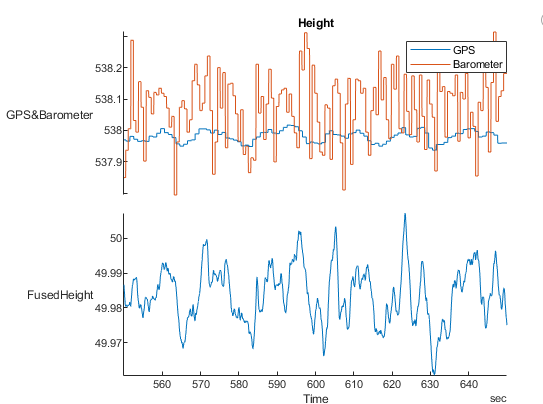
| Stacked plots of barometer reading, GPS altitude reading, and fused height estimate | Barometer#, GPS#, LocalNED |
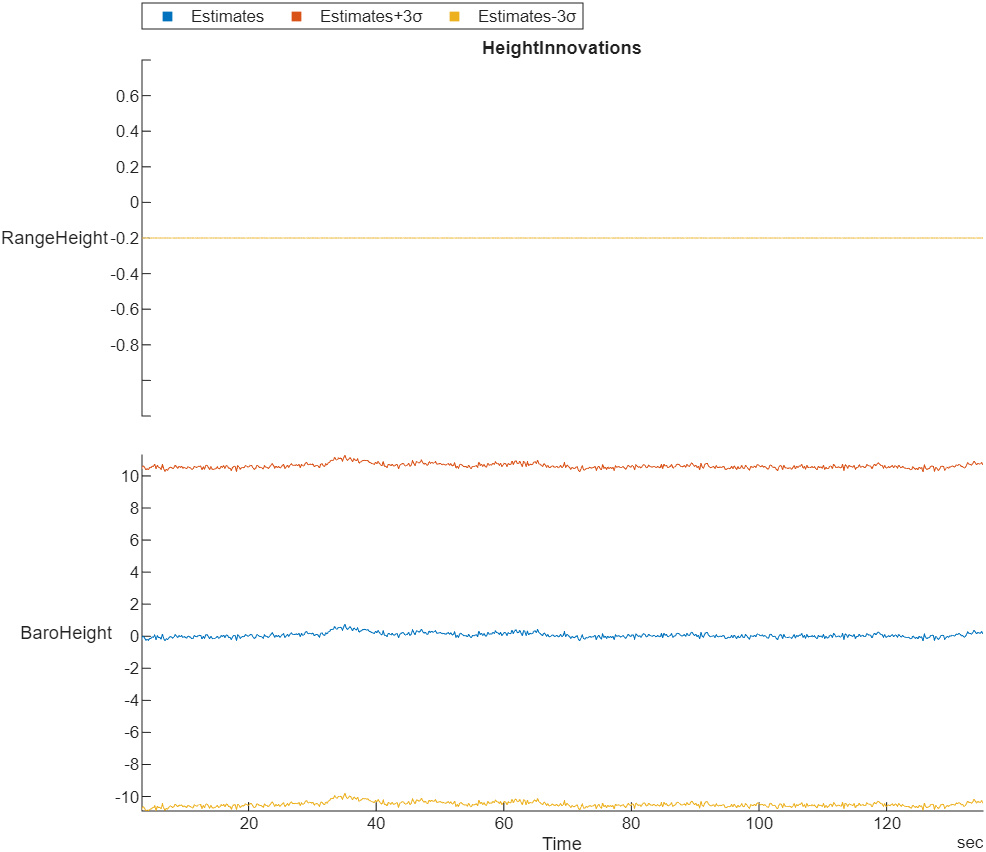
| Stacked plot of EKF range sensor and barometer height innovations and innovation variances | EstimatorInnovationHeight |
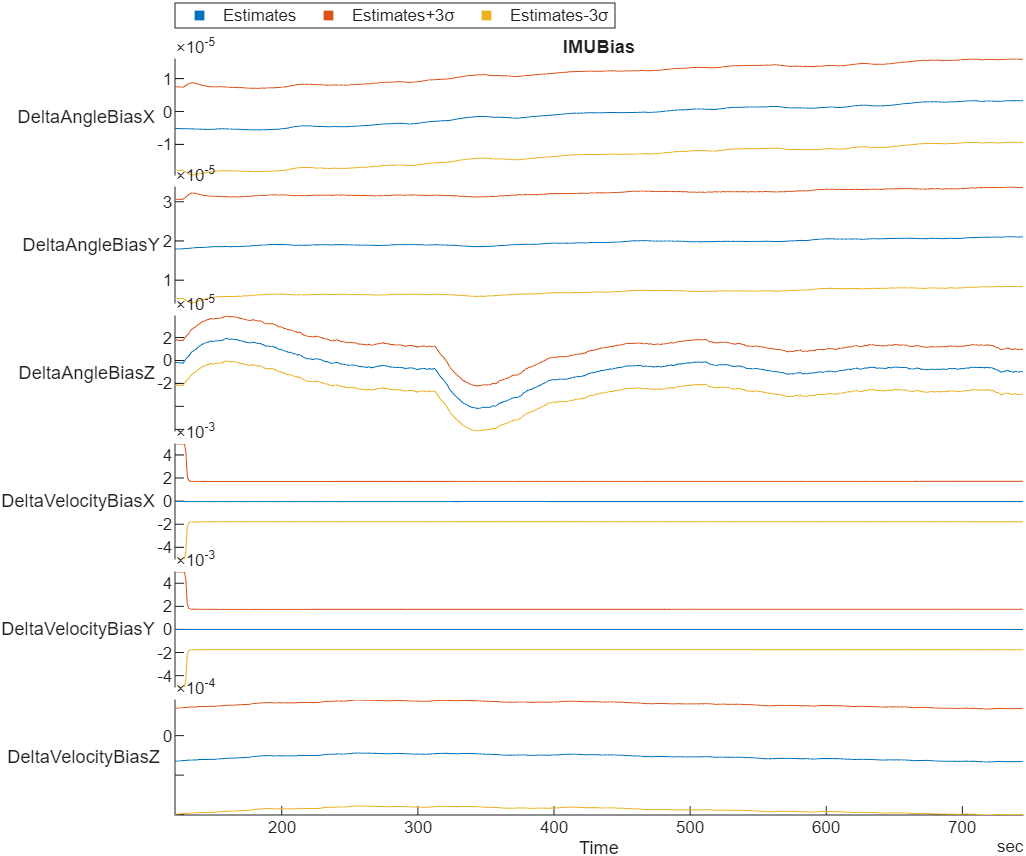
| Stacked plot of EKF inertial measurement unit (IMU) delta angle and velocity bias estimates and bias estimate variances | EstimatorStatesIMUBias |
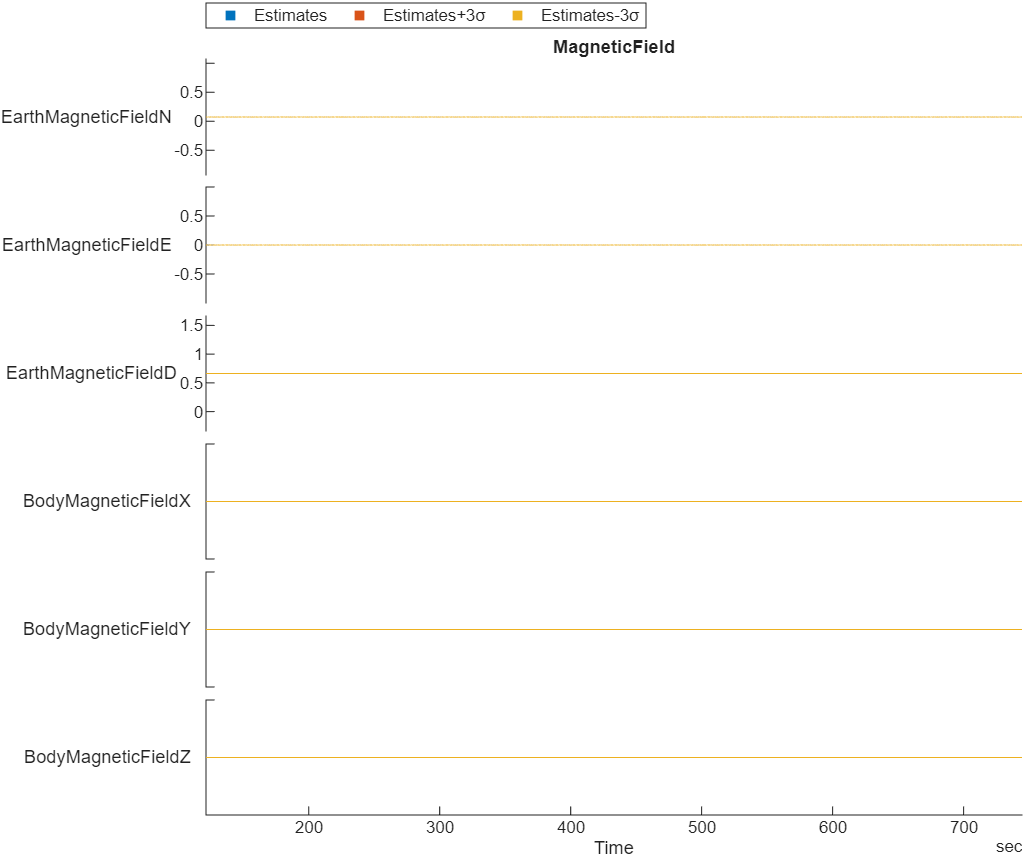
| Stacked plot of EKF Earth magnetic field and UAV body frame magnetic field bias estimates and bias estimate variances | EstimatorStatesMagnetometerBias |
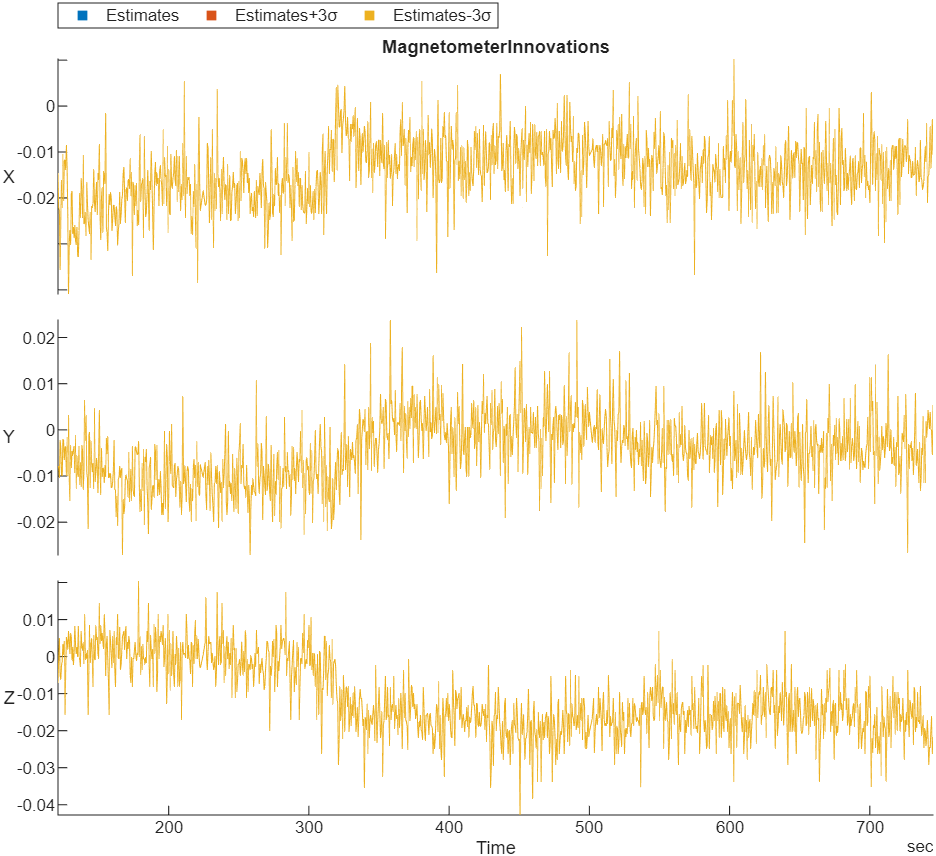
| Stacked plot of EKF Earth magnetic field and UAV body frame magnetic field bias estimates and bias estimates variances | EstimatorInnovationMagnetometert |
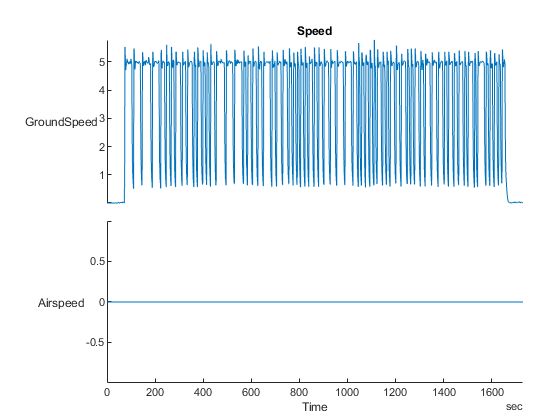
| Stacked plot of ground velocity and air speed | GPS#, Airspeed# |
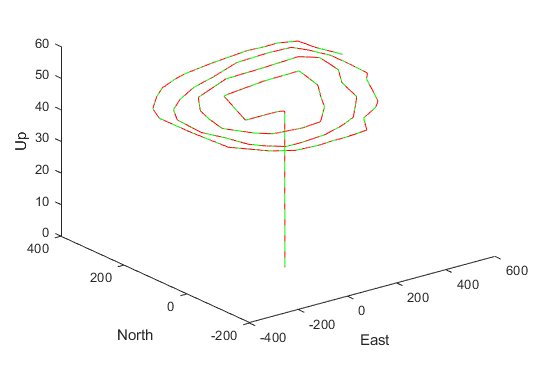
| Trajectory in local NED coordinates versus target set points | LocalNED, LocalNEDTarget |
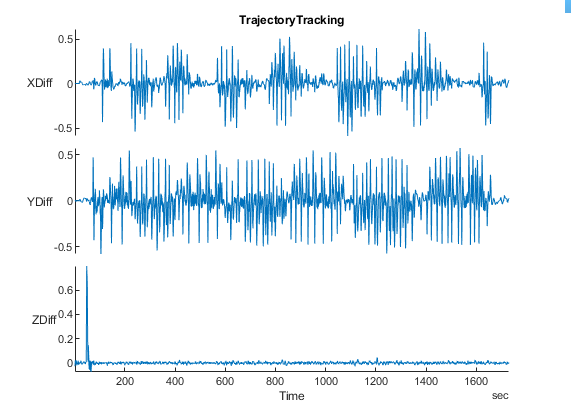
| Error between desired and actual position in NED coordinates | LocalNED, LocalNEDTarget |
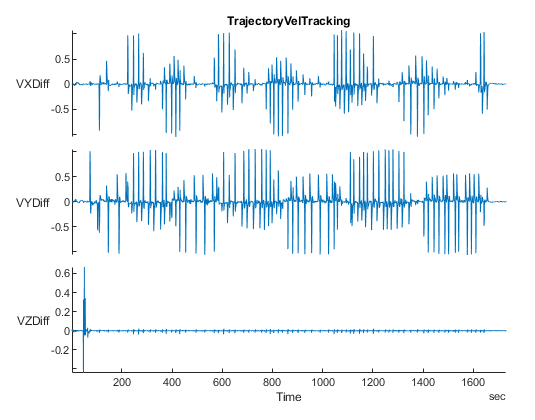
| Error between desired and actual velocity in NED coordinates | LocalNEDVel, LocalNEDVelTarget |
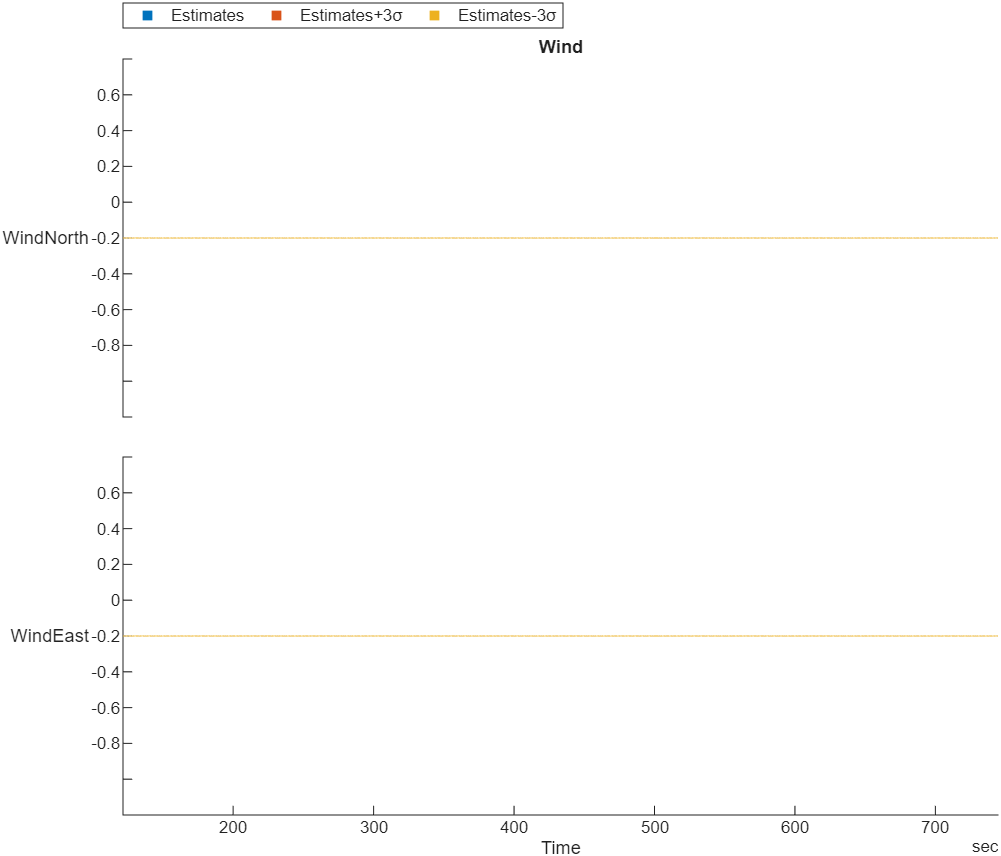
| Wind estimate and estimate variance | EstimatorStatesWind |



Version History
Introduced in R2020b
See Also
flightLogSignalMapping | mavlinktlog | extract | info | show | updatePlot