plan
Syntax
Description
Examples
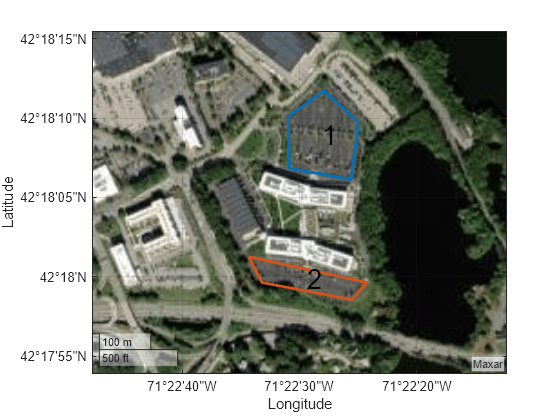
This example shows how to plan a coverage path that surveys the parking lots of the MathWorks Lakeside campus.
Get the geodetic coordinates for the MathWorks Lakeside campus, then create the limits for our map.
mwLS = [42.3013 -71.375 0]; latlim = [mwLS(1)-0.003 mwLS(1)+0.003]; lonlim = [mwLS(2)-0.003 mwLS(2)+0.003];
Create a figure containing the map with the longitude and latitude limits.
fig = figure;
g = geoaxes(fig,Basemap="satellite");
geolimits(latlim,lonlim)Get the outline of the first parking lot in longitude and latitude coordinates. Then create the polygon by concatenating them.
pl1lat = [42.3028 42.30325 42.3027 42.3017 42.3019]'; pl1lon = [-71.37527 -71.37442 -71.3736 -71.37378 -71.375234]'; pl1Poly = [pl1lat pl1lon];
Repeat the process for the second parking lot.
pl2lat = [42.30035 42.2999 42.2996 42.2999]'; pl2lon = [-71.3762 -71.3734 -71.37376 -71.37589]'; pl2poly = [pl2lat pl2lon];
Create the coverage space with both polygons, and specify these properties:
Waypoints coordinates format: Geodetic
Reference location: MathWorks Lakeside campus location
Reference height: 25 meters
Width of sensor footprint: 20 meters
cs = uavCoverageSpace(Polygons={pl1Poly,pl2poly},UseLocalCoordinates=false,...
ReferenceLocation=mwLS,ReferenceHeight=25,UnitWidth=20);Show the coverage space on the map.
show(cs,Parent=g);
Set the sweep angle for polygons 1 and 2 to 85 and 5 degrees, respectively, to have paths that are parallel to the roads in the parking lots. Then create the coverage planner for that coverage space with the exhaustive solver algorithm.
setCoveragePattern(cs,1,SweepAngle=85)
setCoveragePattern(cs,2,SweepAngle=5)
cp = uavCoveragePlanner(cs,Solver="Exhaustive");Set the takeoff position to a location in the courtyard, then plan the coverage path.
takeoff = [42.30089 -71.3752, 0]; [wp,soln] = plan(cp,takeoff); hold on geoplot(wp(:,1),wp(:,2),LineWidth=1.5); geoplot(takeoff(1),takeoff(2),MarkerSize=25,Marker=".") legend("","","Path","Takeoff/Landing") hold off

This example shows how to plan a coverage path for a region in local coordinates and compares the results of using the exhaustive solver with the results of using the minimum traversal solver.
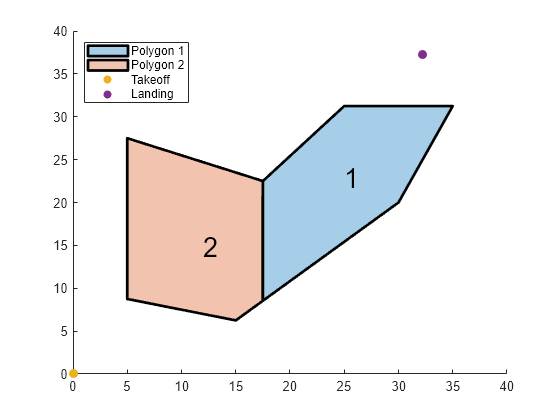
Define the vertices for a coverage space.
area = [5 8.75; 5 27.5; 17.5 22.5; 25 31.25; 35 31.25; 30 20; 15 6.25];
Because vertices define a concave polygon and the coverage planner requires convex polygons, decompose the polygon into convex polygons. Then create a coverage space with the polygons from decomposition.
polygons = coverageDecomposition(area); cs = uavCoverageSpace(Polygons=polygons);
Define the takeoff and landing positions at [0 0 0] and [32.25 37.25 0], respectively. Then show the coverage space and plot the takeoff and landing positions.
takeoff = [0 0 0]; landing = [32.25 37.25 0]; show(cs); exampleHelperPlotTakeoffLandingLegend(takeoff,landing)
Create a coverage planner with the exhaustive solver algorithm and another coverage planner with a minimum traversal solver algorithm. Because Polygon 2 is closer to the takeoff position, set the visiting sequence of the solver parameters such that we traverse Polygon 2 first.
cpeExh = uavCoveragePlanner(cs,Solver="Exhaustive"); cpMin = uavCoveragePlanner(cs,Solver="MinTraversal"); cpeExh.SolverParameters.VisitingSequence = [2 1]; cpMin.SolverParameters.VisitingSequence = [2 1];
Plan with both solver algorithms using the same takeoff and landing positions.
[wptsExh,solnExh] = plan(cpeExh,takeoff,landing); [wptsMin,solnMin] = plan(cpMin,takeoff,landing);
Show the planned path for both the exhaustive and the minimum traversal algorithms.
figure
show(cs);
title("Exhaustive Solver Algorithm")
exampleHelperPlotTakeoffLandingLegend(takeoff,landing,wptsExh)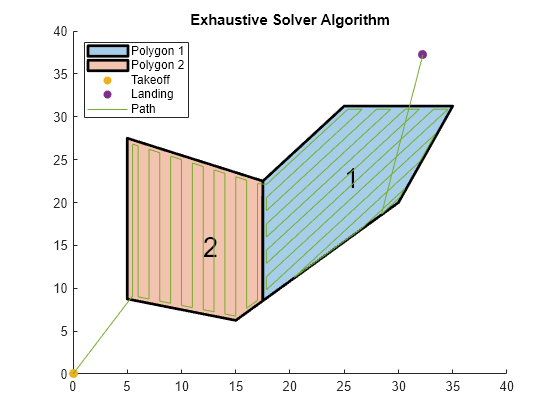
figure
show(cs);
title("Minimum Traversal Solver Algorithm")
exampleHelperPlotTakeoffLandingLegend(takeoff,landing,wptsMin)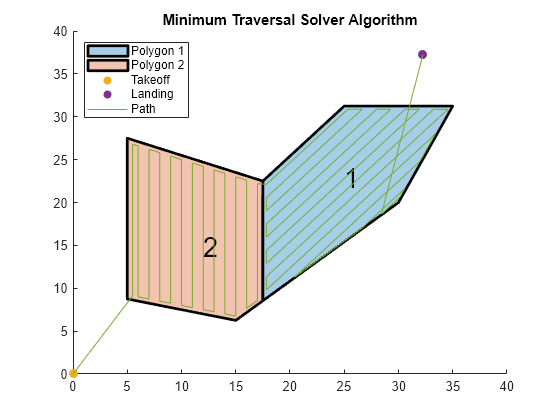
Export the waypoints from the minimum traversal solver to a .waypoints file with the reference frame set to north-east-down.
exportWaypointsPlan(cpMin,solnMin,"coveragepath.waypoints",ReferenceFrame="NED")