estimateFlow
Estimate optical flow
Description
Examples
Create a VideoReader object for the input video file, visiontraffic.avi. Specify the timestamp of the frame to read as 11.
vidReader = VideoReader('visiontraffic.avi',CurrentTime=11);Specify the optical flow estimation method as opticalFlowHS. The output is an object specifying the optical flow estimation method and its properties.
opticFlow = opticalFlowHS
opticFlow =
opticalFlowHS with properties:
Smoothness: 1
MaxIteration: 10
VelocityDifference: 0
Create a custom figure window to visualize the optical flow vectors.
h = figure;
movegui(h);
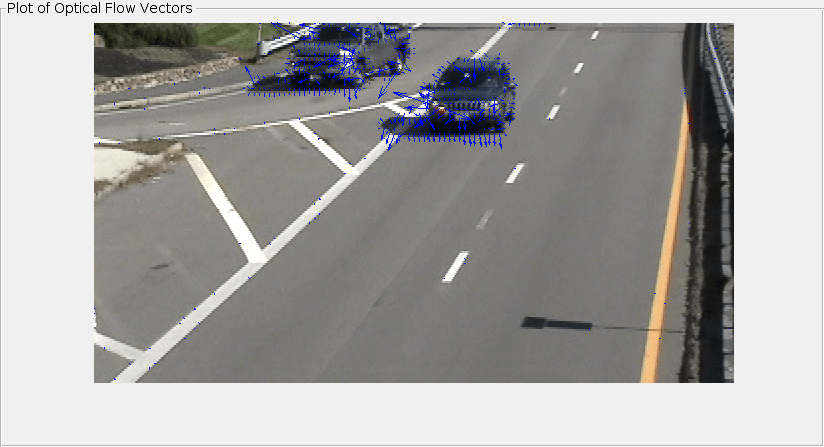
hViewPanel = uipanel(h,Position=[0 0 1 1],Title="Plot of Optical Flow Vectors");
hPlot = axes(hViewPanel);Read image frames from the VideoReader object and convert to grayscale images. Estimate the optical flow from consecutive image frames. Display the current image frame and plot the optical flow vectors as quiver plot.
while hasFrame(vidReader) frameRGB = readFrame(vidReader); frameGray = im2gray(frameRGB); flow = estimateFlow(opticFlow,frameGray); imshow(frameRGB) hold on plot(flow,DecimationFactor=[5 5],ScaleFactor=5,Parent=hPlot); hold off pause(10^-3) end

Input Arguments
Output Arguments
Algorithms
The function estimates optical flow of the input video using the method specified by
the input object opticFlow. The optical flow is estimated as the
motion between two consecutive video frames. The video frame T at the
given instant tcurrent is referred as current
frame and the video frame T-1 is referred as previous frame. The
initial value of the previous frame at time
tcurrent = 0 is set as a uniform image of
grayscale value 0.
Note
If you specify opticFlow as
opticalFlowLKDoG object, then the estimation delays by an
amount relative to the number of video frames. The amount of delay depends on
the value of NumFrames defined in opticalFlowLKDoG object. The
optic flow estimated for a video frame at
tcurrent corresponds to the
video frame at time . tcurrent is the
time of the current video frame.
Extended Capabilities
Version History
Introduced in R2015a