make2DOF
Convert 1-DOF PID controller to 2-DOF controller
Description
Examples
Design a 1-DOF PID controller for a plant.
G = tf(1,[1 0.5 0.1]);
C1 = pidtune(G,'pidf',1.5)C1 =
1 s
Kp + Ki * --- + Kd * --------
s Tf*s+1
with Kp = 1.12, Ki = 0.23, Kd = 1.3, Tf = 0.122
Continuous-time PIDF controller in parallel form.
Model Properties
Convert the controller to two degrees of freedom.
C2 = make2DOF(C1)
C2 =
1 s
u = Kp (b*r-y) + Ki --- (r-y) + Kd -------- (c*r-y)
s Tf*s+1
with Kp = 1.12, Ki = 0.23, Kd = 1.3, Tf = 0.122, b = 1, c = 1
Continuous-time 2-DOF PIDF controller in parallel form.
Model Properties
The new controller has the same PID gains and filter constant. It also contains new terms involving the setpoint weights b and c. By default, b = c = 1. Therefore, in a closed loop with the plant G, the 2-DOF controller C2 yields the same response as C1.
T1 = feedback(G*C1,1);
CM = tf(C2);
T2 = CM(1)*feedback(G,-CM(2));
stepplot(T1,T2,'r--')
Convert C1 to a 2-DOF controller with different b and c values.
C2_2 = make2DOF(C1,0.5,0.75)
C2_2 =
1 s
u = Kp (b*r-y) + Ki --- (r-y) + Kd -------- (c*r-y)
s Tf*s+1
with Kp = 1.12, Ki = 0.23, Kd = 1.3, Tf = 0.122, b = 0.5, c = 0.75
Continuous-time 2-DOF PIDF controller in parallel form.
Model Properties
The PID gains and filter constant are still unchanged, but the setpoint weights now change the closed-loop response.
CM_2 = tf(C2_2);
T2_2 = CM_2(1)*feedback(G,-CM_2(2));
stepplot(T1,T2_2,'r--')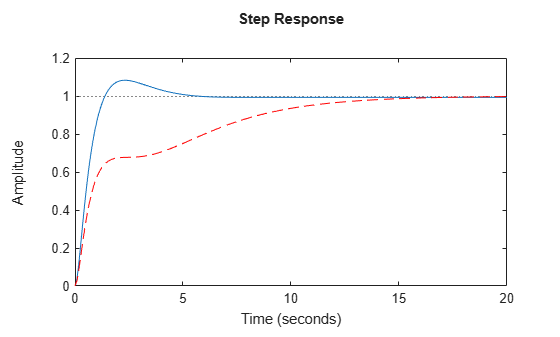
Input Arguments
Output Arguments
Version History
Introduced in R2015b