assessmentTable
Description
Add-On Required: This feature requires the Automated Driving Toolbox Test Suite for Euro NCAP Protocols add-on.
emptyAssessmentTable = assessmentTable(euroAssessmentObj,ncapTestName)emptyAssessmentTable, using the
Euro NCAP® assessment protocol specifications euroAssessmentObj for
the Euro NCAP test scenario with name ncapTestName.
Examples
Specify a Euro NCAP test name from protocol specification years 2026–2028.
ncapTestName = "CA FC CCFtap";Create a Euro NCAP protocol specification object for protocol specification years 2026–2028.
euroAssessmentObj = euroAssessment(2026);
Create an empty Euro NCAP assessment table for the specified Euro NCAP test name.
emptyAssessmentTable = assessmentTable(euroAssessmentObj,ncapTestName)
emptyAssessmentTable=16×2 table
"EgoSpeed = 2.7778m/s, PrimaryTargetSpeed = 8.3333m/s" NaN
"EgoSpeed = 2.7778m/s, PrimaryTargetSpeed = 12.5m/s" NaN
"EgoSpeed = 2.7778m/s, PrimaryTargetSpeed = 16.6667m/s" NaN
"EgoSpeed = 2.7778m/s, PrimaryTargetSpeed = 22.2222m/s" NaN
"EgoSpeed = 4.1667m/s, PrimaryTargetSpeed = 8.3333m/s" NaN
"EgoSpeed = 4.1667m/s, PrimaryTargetSpeed = 12.5m/s" NaN
"EgoSpeed = 4.1667m/s, PrimaryTargetSpeed = 16.6667m/s" NaN
"EgoSpeed = 4.1667m/s, PrimaryTargetSpeed = 22.2222m/s" NaN
"EgoSpeed = 5.5556m/s, PrimaryTargetSpeed = 8.3333m/s" NaN
"EgoSpeed = 5.5556m/s, PrimaryTargetSpeed = 12.5m/s" NaN
"EgoSpeed = 5.5556m/s, PrimaryTargetSpeed = 16.6667m/s" NaN
"EgoSpeed = 5.5556m/s, PrimaryTargetSpeed = 22.2222m/s" NaN
"EgoSpeed = 6.9444m/s, PrimaryTargetSpeed = 8.3333m/s" NaN
"EgoSpeed = 6.9444m/s, PrimaryTargetSpeed = 12.5m/s" NaN
Create a copy of the empty assessment table, and fill in the values of the assessment criteria in the table.
filledAssessmentTable = emptyAssessmentTable; filledAssessmentTable.ImpactVelocity(:) = 1;
Compute the score for the specified Euro NCAP test name.
[score,assessmentTableUpdated] = ncapScore(euroAssessmentObj,ncapTestName,filledAssessmentTable);
Display the updated assessment table.
disp(assessmentTableUpdated)
TestDescription ImpactVelocity EntryStatus Points Weights Colors
_______________________________________________________ ______________ ___________ ______ _______ ______
"EgoSpeed = 2.7778m/s, PrimaryTargetSpeed = 8.3333m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 2.7778m/s, PrimaryTargetSpeed = 12.5m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 2.7778m/s, PrimaryTargetSpeed = 16.6667m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 2.7778m/s, PrimaryTargetSpeed = 22.2222m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 4.1667m/s, PrimaryTargetSpeed = 8.3333m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 4.1667m/s, PrimaryTargetSpeed = 12.5m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 4.1667m/s, PrimaryTargetSpeed = 16.6667m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 4.1667m/s, PrimaryTargetSpeed = 22.2222m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 5.5556m/s, PrimaryTargetSpeed = 8.3333m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 5.5556m/s, PrimaryTargetSpeed = 12.5m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 5.5556m/s, PrimaryTargetSpeed = 16.6667m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 5.5556m/s, PrimaryTargetSpeed = 22.2222m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 6.9444m/s, PrimaryTargetSpeed = 8.3333m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 6.9444m/s, PrimaryTargetSpeed = 12.5m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 6.9444m/s, PrimaryTargetSpeed = 16.6667m/s" 1 "Valid" 0 1 "Red"
"EgoSpeed = 6.9444m/s, PrimaryTargetSpeed = 22.2222m/s" 1 "Valid" 0 1 "Red"
Generate a report showing the consolidated assessment results for the Euro NCAP test.
ncapReport(euroAssessmentObj,ncapTestName);
Export the report as a PNG image.
exportReport(euroAssessmentObj,ncapTestName,"results.png")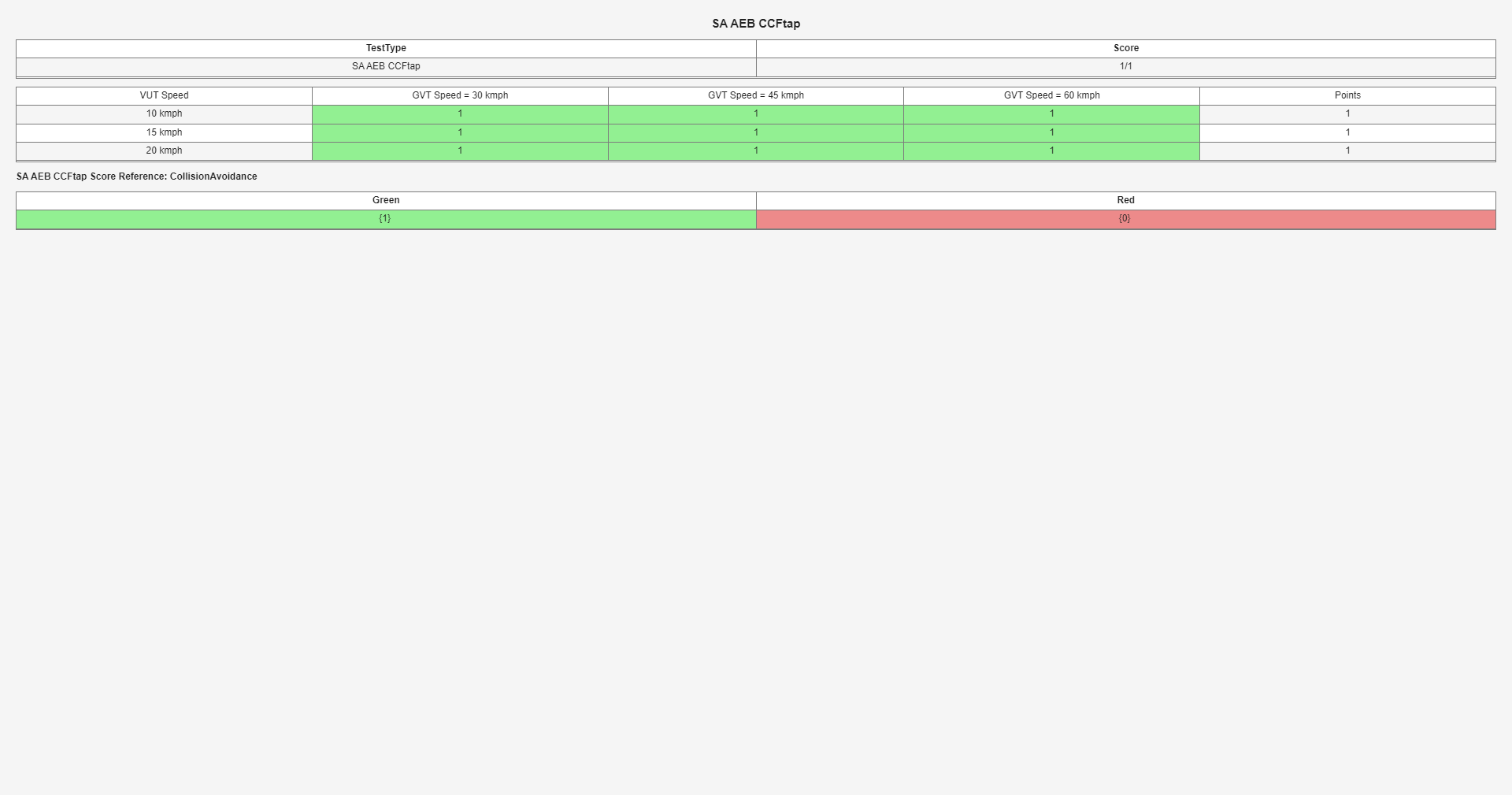
Input Arguments
Output Arguments
Tips
You must replace the NaN fields of the returned table with appropriate
values, and specify the updated table as the assessmentTable input
argument of the ncapScore
function, to get Euro NCAP assessment scores. For more information, see the Compute Score for Euro NCAP Test Scenario and Generate Report example. For more
information on how to compute assessment criteria values, see the Euro NCAP Testing with RoadRunner Scenario example.
References
[1] European New Car Assessment Programme (Euro NCAP). Assessment Protocol - Vulnerable Road User Protection, Implementation 2023, Version 11.4, December 2023.
[2] European New Car Assessment Programme (Euro NCAP). Assessment Protocol - Safety Assist Collision Avoidance, Implementation 2023, Version 10.4.1, February 2024.