Factibilidad utilizando la tarea Optimize basada en problemas de Live Editor
Descripción del problema
Este ejemplo muestra cómo encontrar un punto factible mediante la tarea Optimize de Live Editor utilizando diversos solvers. El problema consiste en encontrar que satisfaga estas restricciones:
.
Represente gráficamente las curvas en las que las funciones de restricción son iguales a cero. Para ver qué parte de la región es factible (valor negativo de la función de restricción), represente las curvas en las que las funciones de restricción son iguales a -1/2. Use la función plotobjconstr que aparece al final de este script.
plotobjconstr
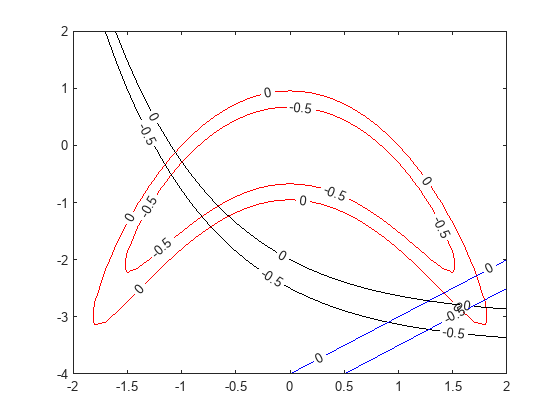
Parece haber una pequeña región factible cerca de . Observe que no hay ningún punto en el que todos los valores de las restricciones sean inferiores a -1/2, por lo que el conjunto factible es pequeño.
Usar la tarea Optimize basada en problemas de Live Editor
Para encontrar un punto factible, inicie la tarea Optimize de Live Editor desde un script en vivo seleccionando Task > Optimize en la pestaña Code o Insert. Elija la tarea basada en problemas.
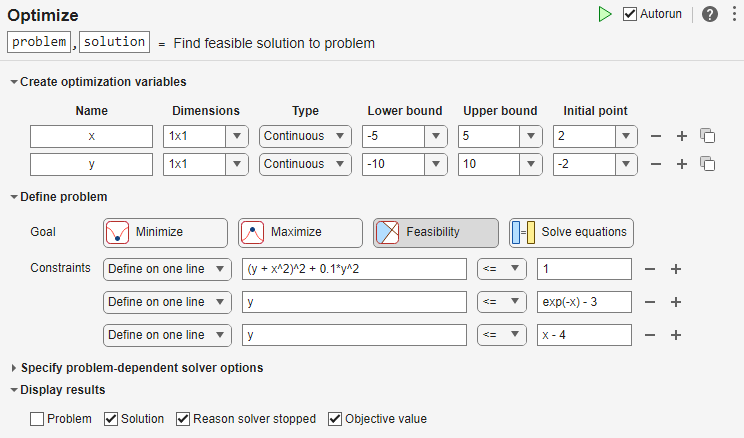
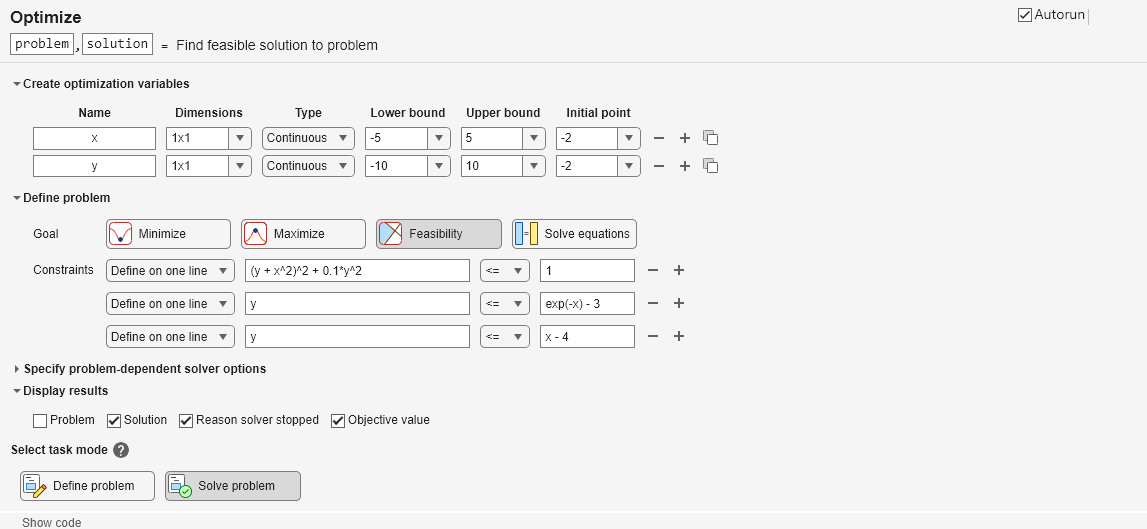
Establezca que la variable del problema x tenga un límite inferior -5 y un límite superior 5. Establezca que la variable del problema y tenga un límite inferior -10 y un límite superior 10. Establezca el punto inicial para x en 2 y para y en -2.
Establezca Goal en Feasibility.
Cree desigualdades que representen las tres restricciones. La tarea debe coincidir con esta imagen.
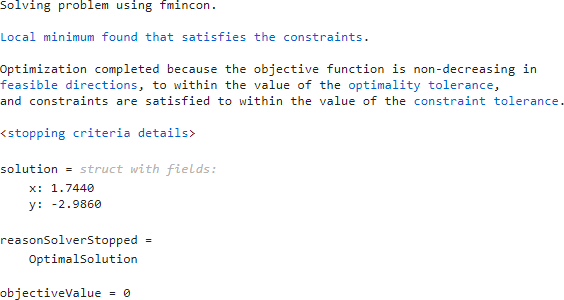
Cambie el modo de tarea a Solve problem. La tarea elige el solver fmincon y llega a la siguiente solución.
Efecto del punto inicial
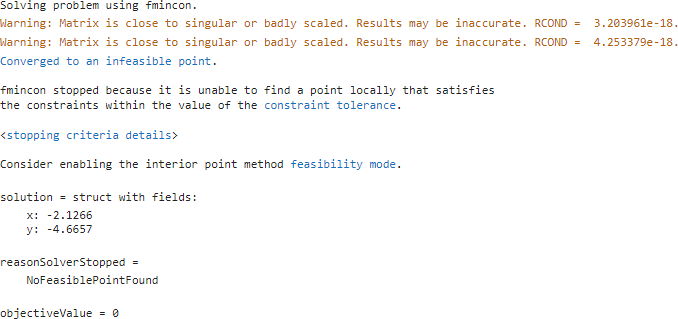
Partir de un punto inicial diferente puede hacer que fmincon no encuentre una solución. Establezca el punto inicial de x en -2.

Esta vez fmincon no encuentra una solución factible.
Probar un solver diferente
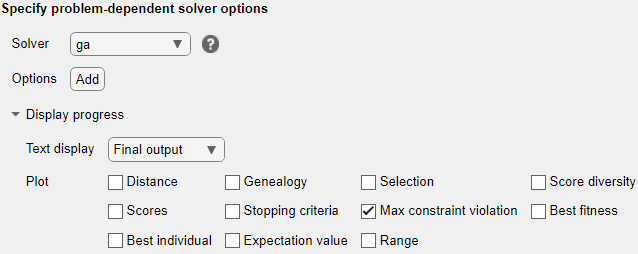
Para intentar encontrar una solución, pruebe con otro solver. Establezca el solver en ga. Para ello, especifique el solver en el expansor Specify problem-dependent solver options. Para monitorizar el progreso del solver, establezca la función de representación gráfica en Max constraint violation.
ga encuentra un punto factible dentro de la tolerancia de restricción.
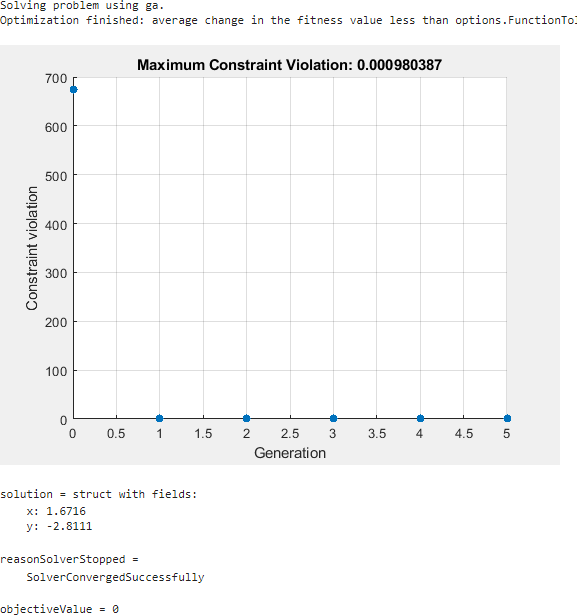
ga encuentra una solución diferente a fmincon. La solución es poco factible. Para obtener una solución con menor infactibilidad, puede establecer la opción de tolerancia de restricción en un valor inferior al predeterminado. También puede probar con otro solver.
Probar surrogateopt
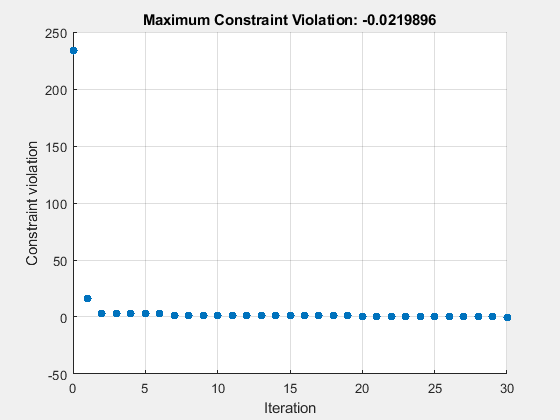
Pruebe a usar el solver surrogateopt. Establezca la función de representación gráfica como Max constraint violation; este ajuste no se traspasa automáticamente desde la solución ga.
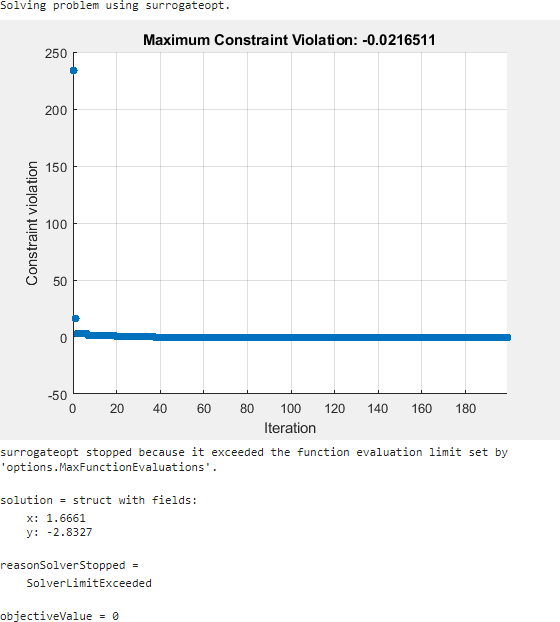
surrogateopt alcanza una solución factible, pero no se detiene cuando alcanza por primera vez una solución. En cambio, surrogateopt continúa iterando hasta que alcanza su límite de evaluación de funciones. Para detener las iteraciones antes, especifique una función de salida que detenga el solver en cuanto la infracción de restricción máxima alcance 1e-6 o menos. Si lo hace, el solver se detendrá mucho antes. Utilice la función auxiliar surrout, que aparece al final de este script. Para especificar esta función, cree un identificador de la función.
outfun = @surrout;
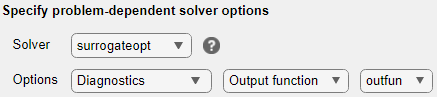
Especifique este identificador de función en el menú desplegable Specify problem-dependent solver options > Options > Diagnostics > Output function.
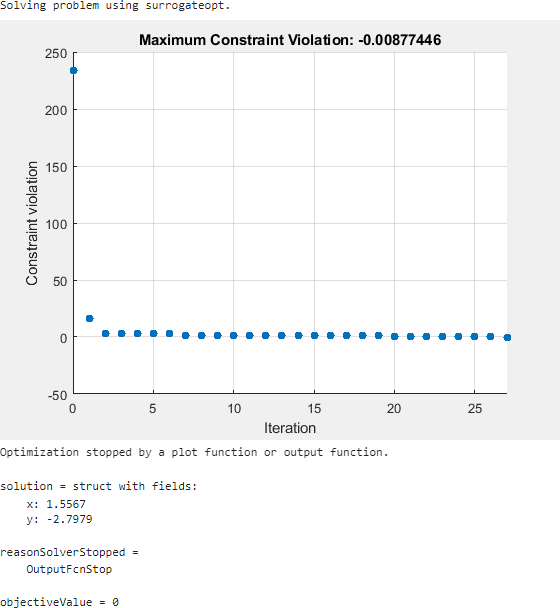
Esta vez el solver se detiene después de unas 30 evaluaciones de la función en lugar de 200. La solución es un poco diferente de la anterior, pero ambas son factibles.
Conclusiones
La tarea Optimize basada en problemas de Live Editor ayuda a probar el uso de diferentes solvers en un problema, incluso solvers que tienen diferentes sintaxis como fmincon y surrogateopt. La tarea también ayuda a establecer funciones de representación gráfica y a configurar otras opciones.
La tarea aparece aquí en su estado final. Experimente con distintos solvers y opciones.
Solving problem using surrogateopt.
Optimization stopped by a plot function or output function.
solution = struct with fields:
x: 1.5639
y: -2.8127
reasonSolverStopped =
OutputFcnStop
objectiveValue = 0
Funciones auxiliares
Este código crea la función auxiliar plotobjconstr.
function plotobjconstr [XX,YY] = meshgrid(-2:0.1:2,-4:0.1:2); ZZ = objconstr([XX(:),YY(:)]).Ineq; ZZ = reshape(ZZ,[size(XX),3]); h = figure; ax = gca; contour(ax,XX,YY,ZZ(:,:,1),[-1/2 0],'r','ShowText','on'); hold on contour(ax,XX,YY,ZZ(:,:,2),[-1/2 0],'k','ShowText','on'); contour(ax,XX,YY,ZZ(:,:,3),[-1/2 0],'b','ShowText','on'); hold off end
Este código crea la función auxiliar objconstr.
function f = objconstr(x) c(:,1) = (x(:,2) + x(:,1).^2).^2 + 0.1*x(:,2).^2 - 1; c(:,2) = x(:,2) - exp(-x(:,1)) + 3; c(:,3) = x(:,2) - x(:,1) + 4; f.Ineq = c; end
Este código crea la función auxiliar surrout
function stop = surrout(~,optimValues,~) stop = false; if optimValues.constrviolation <= 1e-6 % Tolerance for constraint stop = true; end end
Copyright 2022–2024 The MathWorks, Inc.
Consulte también
Optimize | fmincon | ga | surrogateopt