deconvlucy
Enfocar una imagen mediante el método de Lucy-Richardson
Sintaxis
Descripción
J = deconvlucy(I,psf)I que se degradó mediante convolución con una función de dispersión puntual (PSF), psf, y posiblemente mediante ruido aditivo. El algoritmo se basa en maximizar la probabilidad de que la imagen resultante J sea una instancia de la imagen original I según las estadísticas de Poisson.
Para mejorar la restauración, deconvlucy admite varios parámetros opcionales, que se describen más abajo. Utilice [] como marcador de posición si no especifica un parámetro intermedio.
J = deconvlucy(I,psf,iter,dampar,weight)I se tienen en cuenta en la restauración. El valor de un elemento del arreglo weight determina cuánto se considera el píxel en la posición correspondiente en la imagen de entrada. Por ejemplo, para excluir un píxel de la consideración, asígnele un valor de 0 en el arreglo weight. Puede ajustar el valor de ponderación asignado a cada píxel según la cantidad de corrección de campo plano.
Ejemplos
Lea y muestre una imagen nítida que no esté desenfocada ni tenga ruido. Este ejemplo recorta opcionalmente la imagen a un tamaño de 256 por 256 con la coordenada superior izquierda (x,y) en (2,50).
I = imread("board.tif"); I = imcrop(I,[2 50 255 255]); imshow(I) title("Original Image")

Cree una PSF que represente un desenfoque gaussiano con una desviación estándar de 5 y un filtro de tamaño 5 por 5.
PSF = fspecial("gaussian",5,5);Simule desenfoque en la imagen.
blurred = imfilter(I,PSF,"symmetric","conv");
Añada ruido gaussiano de media cero simulado.
V = 0.002; blurred_noisy = imnoise(blurred,"gaussian",0,V); imshow(blurred_noisy) title("Blurred and Noisy Image")
Utilice deconvlucy para restaurar la imagen desenfocada y con ruido. Especifique la PSF utilizada para crear el desenfoque y reduzca el número de iteraciones a 5.
luc1 = deconvlucy(blurred_noisy,PSF,5);
imshow(luc1)
title("Restored Image")
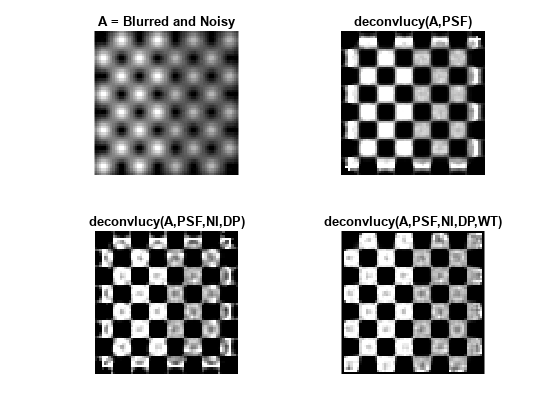
Cree una imagen de muestra y desenfóquela.
I = checkerboard(8); PSF = fspecial('gaussian',7,10); V = .0001; BlurredNoisy = imnoise(imfilter(I,PSF),'gaussian',0,V);
Cree un arreglo de ponderaciones y llame a deconvlucy utilizando varios parámetros opcionales.
WT = zeros(size(I)); WT(5:end-4,5:end-4) = 1; J1 = deconvlucy(BlurredNoisy,PSF); J2 = deconvlucy(BlurredNoisy,PSF,20,sqrt(V)); J3 = deconvlucy(BlurredNoisy,PSF,20,sqrt(V),WT);
Muestre los resultados.
subplot(221);imshow(BlurredNoisy); title('A = Blurred and Noisy'); subplot(222);imshow(J1); title('deconvlucy(A,PSF)'); subplot(223);imshow(J2); title('deconvlucy(A,PSF,NI,DP)'); subplot(224);imshow(J3); title('deconvlucy(A,PSF,NI,DP,WT)');
Argumentos de entrada
Argumentos de salida
Sugerencias
Puede usar
deconvlucypara realizar una deconvolución que empiece donde se detuvo una anterior. Para utilizar esta característica, pase la imagen de entradaIcomo un arreglo de celdas{I}. Al hacerlo, la funcióndeconvlucydevuelve la imagen de salidaJcomo un arreglo de celdas, que puede pasar como arreglo de entrada en la siguiente llamada adeconvlucy. El arreglo de celdas de salidaJcontiene cuatro elementos:J{1}contieneI, la imagen original.J{2}contiene el resultado de la última iteración.J{3}contiene el resultado de la penúltima iteración.J{4}es un arreglo generado por el algoritmo iterativo.La imagen de salida
Jpodría mostrar artefactos de anillo introducidos por la transformada discreta de Fourier utilizada en el algoritmo. Para reducir la intensidad de los artefactos , utiliceI = edgetaper(I,psf)antes de llamar adeconvlucy.deconvlucyconvierte la PSF endoublesin normalización.deconvlucypuede devolver valores de la imagen de salida que están más allá del rango de la imagen de entrada.
Referencias
[1] D. S. C. Biggs and M. Andrews, Acceleration of iterative image restoration algorithms, Applied Optics, Vol. 36, No. 8, 1997.
[2] R. J. Hanisch, R. L. White, and R. L. Gilliland, Deconvolutions of Hubble Space Telescope Images and Spectra, Deconvolution of Images and Spectra, Ed. P.A. Jansson, 2nd ed., Academic Press, CA, 1997.