derivative
Descripción
stateDot = derivative(kinematicModel,state,cmds)stateDot, como un vector de tres elementos [xDot yDot thetaDot] para un modelo de movimiento del vehículo cinemático de bicicleta, kinematicModel. xDot y yDot se refieren a la velocidad del vehículo, especificada en metros por segundo. thetaDot es la velocidad angular del rumbo del vehículo, especificada en radianes por segundo.
Ejemplos
Cree un robot y establezca su posición inicial y orientación.
kinematicModel = bicycleKinematics; initialState = [0 0 0];
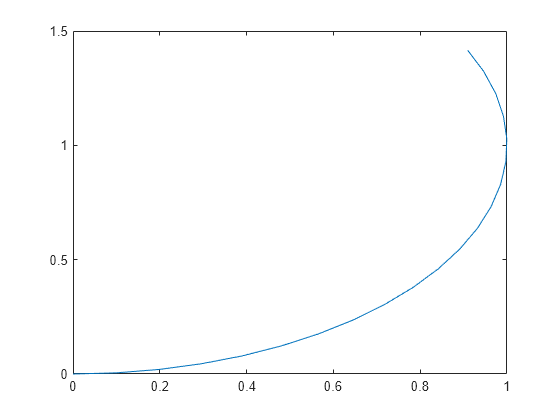
Establezca la escala de tiempo de la simulación en 1 s con unidades de tiempo de 0,05 s, los comandos de entrada en 2 m/s para la velocidad del vehículo y pi/4 radianes para el ángulo de giro para crear un giro a la izquierda. Simule el movimiento del robot utilizando el solucionador ode45 en la función derivative.
tspan = 0:0.05:1;
inputs = [2 pi/4]; %Turn left
[t,y] = ode45(@(t,y)derivative(kinematicModel,y,inputs),tspan,initialState);Traza la ruta.
figure plot(y(:,1),y(:,2))
Argumentos de entrada
Argumentos de salida
Referencias
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control. 1st ed. Cambridge, MA: Cambridge University Press, 2017.
Capacidades ampliadas
Historial de versiones
Introducido en R2021b