bicycleKinematics
Descripción
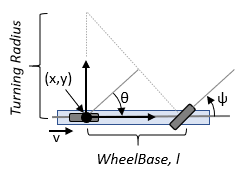
bicycleKinematics crea un modelo de vehículo bicicleta para simular dinámicas de vehículos similares a un automóvil. Este modelo representa un vehículo con dos ejes separados por una distancia, WheelBase. Estado del vehículo se define como un vector de tres elementos, [xy theta], con la posición global xy especificada en metros, y el ángulo de giro del vehículo, theta, especificado en radianes. La rueda delantera se puede girar con el ángulo de dirección psi. La dirección del vehículo theta está definida en el centro del eje trasero. Para calcular los estados de las derivadas de tiempo del modelo, use la función derivative con comandos de entrada y el estado actual del robot.
Creación
Descripción
kinematicModel = bicycleKinematics
kinematicModel = bicycleKinematics(Name,Value)
Propiedades
Funciones del objeto
derivative | Derivada temporal del modelo de vehículo bicicleta. |
Ejemplos
Cree un robot y establezca su posición de partida inicial y orientación.
kinematicModel = bicycleKinematics; initialState = [0 0 0];
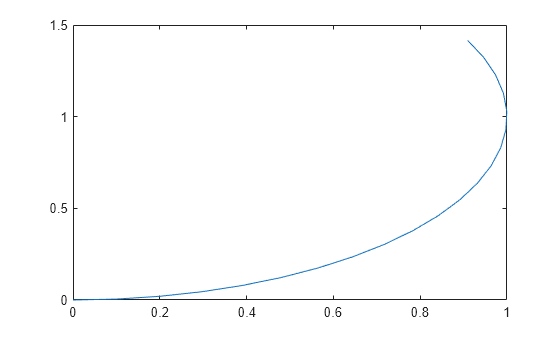
Establezca la escala de tiempo de la simulación en 1 s con unidades de tiempo de 0,05 s, los comandos de entrada en 2 m/s para la velocidad del vehículo y pi/4 radianes para el ángulo de dirección para crear un giro a la izquierda. Simule el movimiento del robot utilizando el solucionador ode45 en la función derivative.
tspan = 0:0.05:1;
inputs = [2 pi/4]; %Turn left
[t,y] = ode45(@(t,y)derivative(kinematicModel,y,inputs),tspan,initialState);Representa la ruta.
figure plot(y(:,1),y(:,2))
Referencias
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control 1st ed. Cambridge, MA: Cambridge University Press, 2017.
[2] Corke, Peter I. Robotics, Vision and Control: Fundamental Algorithms in MATLAB. Springer, 2011.
Capacidades ampliadas
Historial de versiones
Introducido en R2021b
Consulte también
Temas
- Ecuaciones de cinemática para robots móviles (Robotics System Toolbox)