connect
Conectar poses para un tipo de conexión determinado
Sintaxis
Descripción
[ conecta las poses de inicio y meta utilizando el objeto pathSegments,pathCosts] = connect(connectionObj,start,goal)dubinsConnection especificado. Se devuelve el objeto de segmento de ruta con el coste más bajo.
[ devuelve todos los segmentos de ruta posibles como un arreglo de celdas con sus costos asociados.pathSegments,pathCosts] = connect(connectionObj,start,goal,'PathSegments','all')
Ejemplos
Cree un objeto dubinsConnection.
dubConnObj = dubinsConnection;
Define las poses de inicio y destino como vectores [x y theta].
startPose = [0 0 0]; goalPose = [1 1 pi];
Calcula un segmento de ruta válido para conectar las poses.
[pathSegObj, pathCosts] = connect(dubConnObj,startPose,goalPose);
Muestra la ruta generada.
show(pathSegObj{1})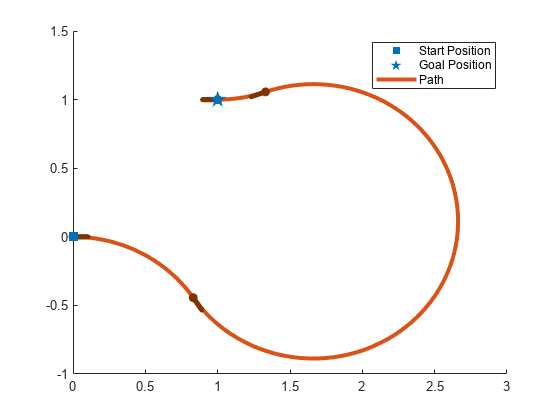
Cree un objeto reedsSheppConnection.
reedsConnObj = reedsSheppConnection;
Define las poses de inicio y destino como vectores [x y theta].
startPose = [0 0 0]; goalPose = [1 1 pi];
Calcula un segmento de ruta válido para conectar las poses.
[pathSegObj,pathCosts] = connect(reedsConnObj,startPose,goalPose);
Muestra la ruta generada.
show(pathSegObj{1})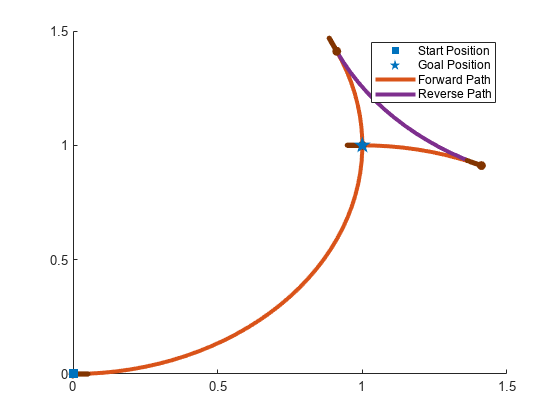
Argumentos de entrada
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2019b