show
Visualizar segmento de ruta
Descripción
show( traza el segmento de la ruta con las posiciones de inicio y destino y sus rumbos.pathSeg)
show( también especifica pares pathSeg,Name,Value)Name,Value para controlar la configuración de visualización.
Ejemplos
Cree un objeto dubinsConnection.
dubConnObj = dubinsConnection;
Define las poses de inicio y destino como vectores [x y theta].
startPose = [0 0 0]; goalPose = [1 1 pi];
Calcula un segmento de ruta válido para conectar las poses.
[pathSegObj, pathCosts] = connect(dubConnObj,startPose,goalPose);
Muestra la ruta generada.
show(pathSegObj{1})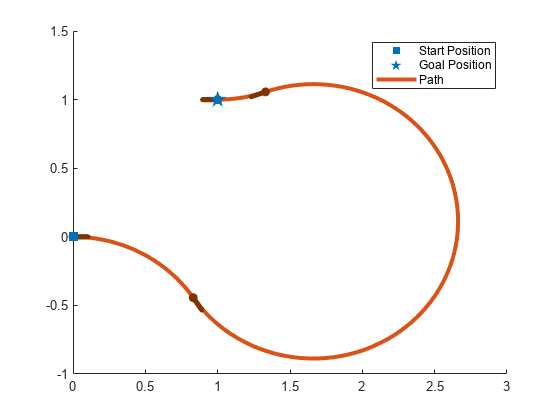
Cree un objeto reedsSheppConnection.
reedsConnObj = reedsSheppConnection;
Define las poses de inicio y destino como vectores [x y theta].
startPose = [0 0 0]; goalPose = [1 1 pi];
Calcula un segmento de ruta válido para conectar las poses.
[pathSegObj,pathCosts] = connect(reedsConnObj,startPose,goalPose);
Muestra la ruta generada. Observe la dirección de los giros.
show(pathSegObj{1})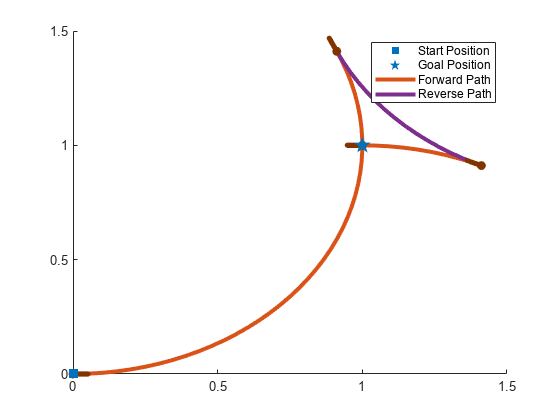
pathSegObj{1}.MotionTypesans = 1×5 cell
{'L'} {'R'} {'L'} {'N'} {'N'}
pathSegObj{1}.MotionDirectionsans = 1×5
1 -1 1 1 1
Deshabilite esta secuencia de movimiento específica en un nuevo objeto de conexión. Reduce MinTurningRadius si el robot es más maniobrable. Aumente el coste inverso para reducir la probabilidad de que se utilicen direcciones inversas. Conecta las poses nuevamente para obtener una ruta diferente.
reedsConnObj = reedsSheppConnection('DisabledPathTypes',{'LpRnLp'}); reedsConnObj.MinTurningRadius = 0.5; reedsConnObj.ReverseCost = 5; [pathSegObj,pathCosts] = connect(reedsConnObj,startPose,goalPose); pathSegObj{1}.MotionTypes
ans = 1×5 cell
{'L'} {'S'} {'L'} {'N'} {'N'}
show(pathSegObj{1})
xlim([0 1.5])
ylim([0 1.5])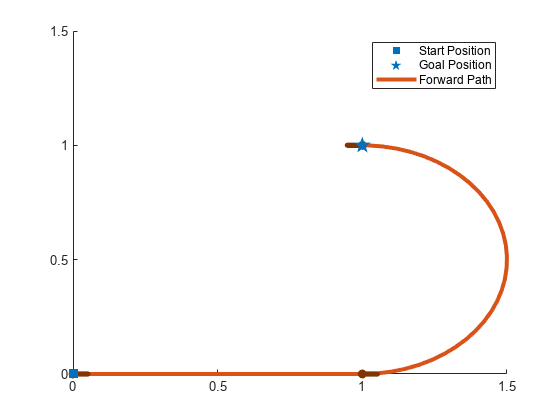
Cree un objeto dubinsConnection.
dubConnObj = dubinsConnection;
Define las poses de inicio y destino como vectores [x y theta].
startPose = [0 0 0]; goalPose = [1 1 pi];
Calcula un segmento de ruta válido para conectar las poses.
[pathSegObj,pathCosts] = connect(dubConnObj,startPose,goalPose);
Muestra la ruta generada.
show(pathSegObj{1})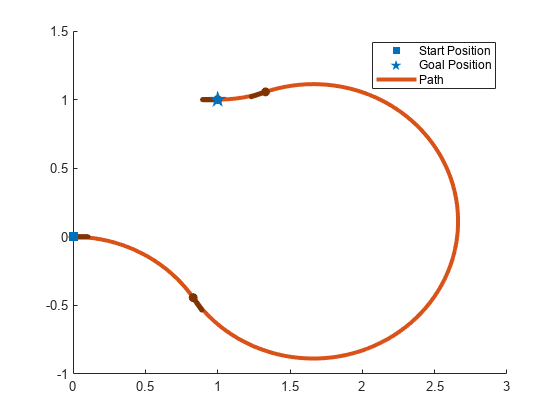
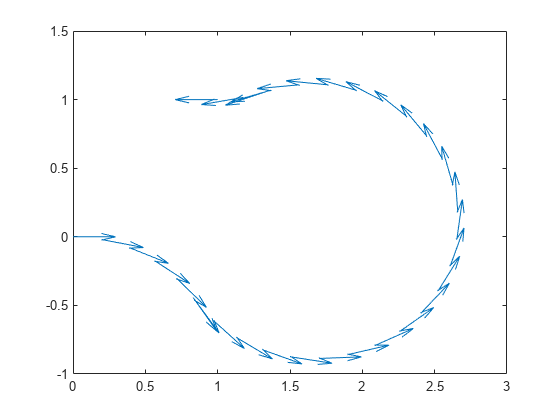
Interpola poses a lo largo de la ruta. Haz una pose cada 0,2 metros, incluidas las transiciones entre giros.
length = pathSegObj{1}.Length;
poses = interpolate(pathSegObj{1},0:0.2:length)poses = 32×3
0 0 0
0.1987 -0.0199 6.0832
0.3894 -0.0789 5.8832
0.5646 -0.1747 5.6832
0.7174 -0.3033 5.4832
0.8309 -0.4436 5.3024
0.8418 -0.4595 5.3216
0.9718 -0.6110 5.5216
1.1293 -0.7337 5.7216
1.3081 -0.8226 5.9216
1.5010 -0.8743 6.1216
1.7003 -0.8866 0.0384
1.8980 -0.8590 0.2384
2.0864 -0.7927 0.4384
2.2578 -0.6904 0.6384
⋮
Utilice la función quiver para trazar estas poses.
quiver(poses(:,1),poses(:,2),cos(poses(:,3)),sin(poses(:,3)),0.5)
Argumentos de entrada
Argumentos de par nombre-valor
Historial de versiones
Introducido en R2019b