setOccupancy
Establecer probabilidad de ocupación de ubicaciones
Sintaxis
Descripción
Ejemplos
Crea un objeto occupancyMap3D.
map3D = occupancyMap3D;
Cree un plano de tierra y establezca los valores de ocupación en 0.
[xGround,yGround,zGround] = meshgrid(0:100,0:100,0); xyzGround = [xGround(:) yGround(:) zGround(:)]; occval = 0; setOccupancy(map3D,xyzGround,occval)
Crea obstáculos en ubicaciones mundiales específicas del mapa.
[xBuilding1,yBuilding1,zBuilding1] = meshgrid(20:30,50:60,0:30); [xBuilding2,yBuilding2,zBuilding2] = meshgrid(50:60,10:30,0:40); [xBuilding3,yBuilding3,zBuilding3] = meshgrid(40:60,50:60,0:50); [xBuilding4,yBuilding4,zBuilding4] = meshgrid(70:80,35:45,0:60); xyzBuildings = [xBuilding1(:) yBuilding1(:) zBuilding1(:);... xBuilding2(:) yBuilding2(:) zBuilding2(:);... xBuilding3(:) yBuilding3(:) zBuilding3(:);... xBuilding4(:) yBuilding4(:) zBuilding4(:)];
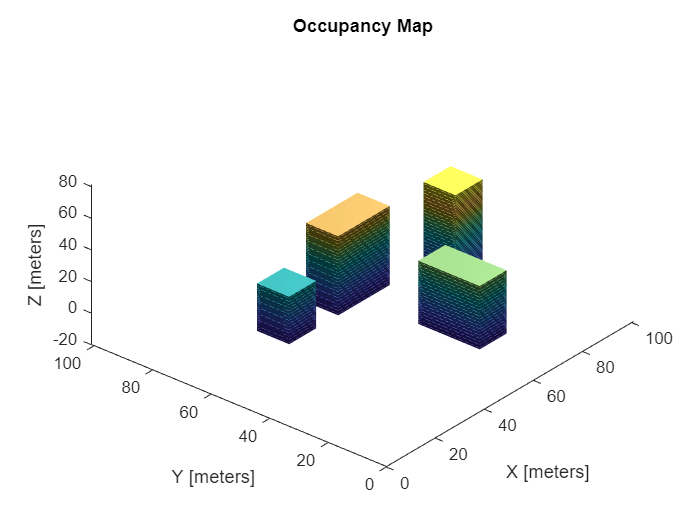
Actualiza los obstáculos con nuevos valores de probabilidad y muestra el mapa.
obs = 0.65; updateOccupancy(map3D,xyzBuildings,obs) show(map3D)
Verifique si el archivo de mapa llamado citymap.ot ya existe en el directorio actual y elimínelo antes de crear el archivo de mapa.
if exist("citymap.ot",'file') delete("citymap.ot") end
Exporte el mapa como un archivo octree.
filePath = fullfile(pwd,"citymap.ot");
exportOccupancyMap3D(map3D,filePath)Argumentos de entrada
Capacidades ampliadas
Historial de versiones
Introducido en R2019b