transformScan
Transformar el escaneo láser según la pose relativa
Sintaxis
Descripción
[ transforma el escaneo láser especificado en transRanges,transAngles] = transformScan(ranges,angles,relPose)ranges y angles utilizando la pose relativa especificada, relPose.
Ejemplos
Transformar los escaneos láser
Cree un objeto lidarScan . Especifique los alcances y los ángulos como vectores.
refRanges = 5*ones(1,300); refAngles = linspace(-pi/2,pi/2,300); refScan = lidarScan(refRanges,refAngles);
Traduzca el escaneo láser mediante un desplazamiento [x y] de (0.5,0.2).
transformedScan = transformScan(refScan,[0.5 0.2 0]);
Gire el escaneo láser 20 grados.
rotateScan = transformScan(refScan,[0,0,deg2rad(20)]);
Utilice Scan Matching para transformar escaneos
Utilice la función matchScans para encontrar la transformación relativa entre dos escaneos lidar. Luego, transforme el segundo escaneo en el marco de coordenadas del primer escaneo.
Cargue un par de escaneos LIDAR como un par de objetos lidarScan . Son dos escaneos de la misma escena con un cambio de pose relativa.
load tb3_scanPair.mat plot(s1) hold on plot(s2) hold off
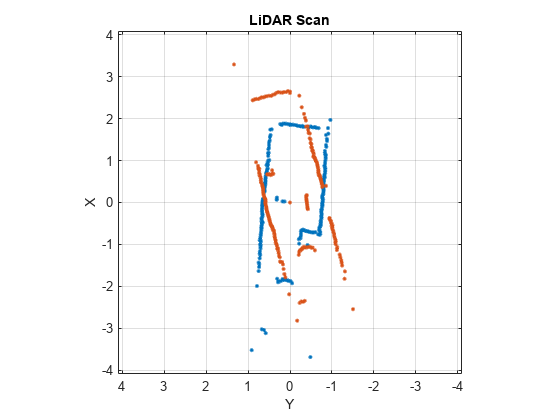
La pose relativa se estima a partir de un sensor de odometría y se proporciona como una variable, initGuess, como [x y theta].
disp(initGuess)
-0.7000 0.1500 -0.3254
Utilice la coincidencia de escaneo para encontrar la pose relativa entre los dos escaneos láser y especifique la suposición inicial de la pose.
pose = matchScans(s2,s1,"InitialPose",initGuess);
disp(pose)-0.7213 0.1160 -0.2854
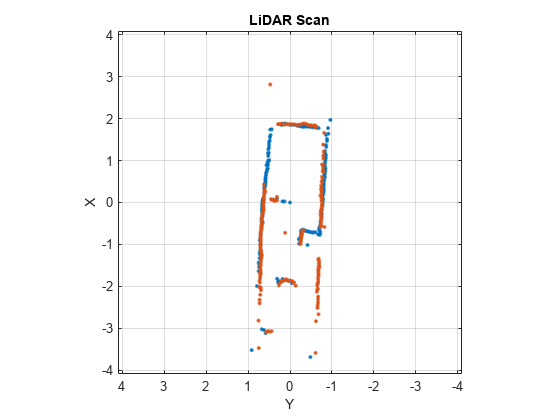
Transforme el segundo escaneo al marco de coordenadas del primer escaneo. Traza los dos escaneos para ver que ahora se superponen.
s2Transformed = transformScan(s2,pose); plot(s1) hold on plot(s2Transformed) hold off
Argumentos de entrada
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2017a
Consulte también
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)