Esta página es para la versión anterior. La página correspondiente en inglés ha sido eliminada en la versión actual.
Localización y estimación de pose.
Utilice algoritmos de localización y estimación de pose para orientar su vehículo en su entorno. La fusión de sensores inerciales utiliza filtros para mejorar y combinar lecturas de sensores para IMU, GPS y otros. Los algoritmos de localización, como la localización de Montecarlo y la comparación de escaneos, estiman su pose en un mapa conocido mediante sensores de distancia o lecturas lidar. Los gráficos de pose realizan un seguimiento de sus poses estimadas y se pueden optimizar en función de las restricciones de los bordes y los cierres de bucles.
Para modelar sensores específicos, consulte Modelos de sensor.
Para localización y mapeo simultáneos, consulte SLAM.
Categorías
- Fusión de sensores inerciales
Navegación inercial con IMU y GPS, fusión de sensores, ajuste de filtro personalizado
- Algoritmos de localización
Filtros de partículas, coincidencia de escaneos, localización Montecarlo, gráficos de pose, odometría
Ejemplos destacados
Fusión IMU y GPS para navegación inercial
Este ejemplo muestra cómo se podría construir un algoritmo de fusión IMU + GPS adecuado para vehículos aéreos no tripulados (UAV) o cuadricópteros.

Odometría visual-inercial utilizando datos sintéticos
Este ejemplo muestra cómo estimar la pose (posición y orientación) de un vehículo terrestre utilizando una unidad de medición inercial (IMU) y una cámara monocular. En este ejemplo, usted:
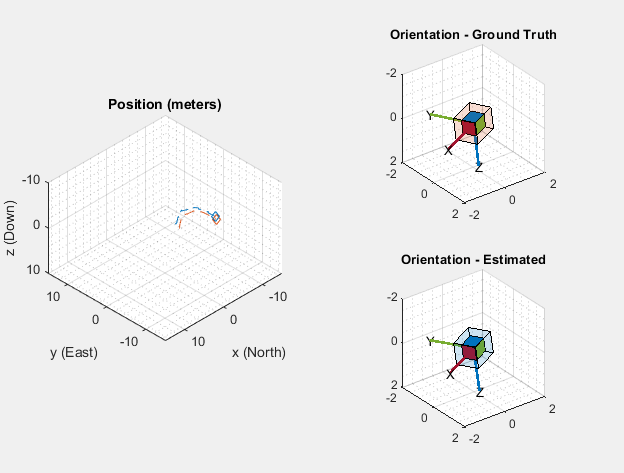
Estimar la orientación del teléfono mediante Sensor Fusion
MATLAB ® Mobile™ informa datos de los sensores del acelerómetro, giroscopio y magnetómetro en dispositivos móviles Apple o Android®. Se pueden obtener datos sin procesar de cada sensor o datos de orientación fusionados. Este ejemplo muestra cómo comparar los datos de orientación fusionados del teléfono con la estimación de orientación del objeto ahrsfilter.

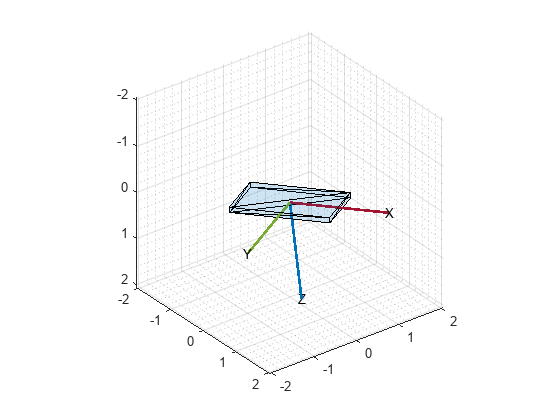
Estimar la posición y orientación de un vehículo terrestre
Este ejemplo muestra cómo estimar la posición y orientación de vehículos terrestres fusionando datos de una unidad de medición inercial (IMU) y un receptor del sistema de posicionamiento global (GPS).
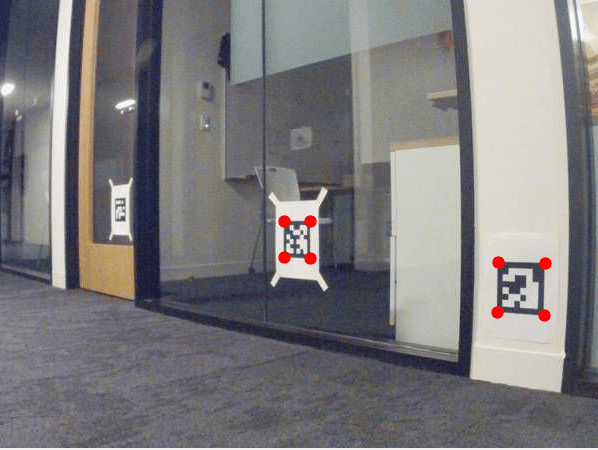
SLAM de punto de referencia usando marcadores AprilTag
Combine los datos de odometría del robot y los marcadores AprilTag para implementar SLAM con un gráfico de factores y un gráfico de pose, y compare los resultados.

Reduzca la deriva en la trayectoria de odometría visual 3D mediante gráficos de pose
Este ejemplo muestra cómo reducir la desviación en la trayectoria estimada (ubicación y orientación) de una cámara monocular mediante la optimización del gráfico de pose 3D. La odometría visual estima la pose global actual de la cámara (cuadro actual). Debido a una mala coincidencia o errores en la triangulación de puntos tridimensionales, las trayectorias de los robots a menudo tienden a desviarse de ground-truth. La detección de cierre de bucle y la optimización del gráfico de pose reducen esta desviación y corrigen los errores.

Odometría visual-inercial monocular (VIO) mediante grafo de factores
Implementar odometría visual-inercial monocular para localizar un UAV utilizando datos de cámara e IMU, optimizados mediante un grafo de factores.