write
Description
Examples
Retrieve all the information from the rosbag log file.
rosbag('info','path_record.bag')
Path: /tmp/Bdoc26a_3233028_1765100/tp5304e008/ros-ex73035957/path_record.bag
Version: 2.0
Duration: 10.5s
Start: Jul 05 2021 08:09:52.86 (1625486992.86)
End: Jul 05 2021 08:10:03.40 (1625487003.40)
Size: 13.3 KB
Messages: 102
Types: geometry_msgs/Point [4a842b65f413084dc2b10fb484ea7f17]
Topics: /circle 51 msgs : geometry_msgs/Point
/line 51 msgs : geometry_msgs/Point
Create a rosbagreader object of all the messages in the rosbag log file.
reader = rosbagreader('path_record.bag');Select all the messages related to the topic '/circle'.
bagSelCircle = select(reader,'Topic','/circle');
Retrieve the list of timestamps from the topic.
timeStamps = bagSelCircle.MessageList.Time;
Retrieve the messages in the selection as a cell array.
messages = readMessages(bagSelCircle);
Create a rosbagwriter object to write the messages to a new rosbag file.
circleWriter = rosbagwriter('circular_path_record.bag');Write all the messages related to the topic '/circle' to the new rosbag file.
write(circleWriter,'/circle',timeStamps,messages);Remove the rosbagwriter object from memory and clear the associated object.
delete(circleWriter)
clear circleWriterRetrieve all the information from the new rosbag log file.
rosbag('info','circular_path_record.bag')
Path: /tmp/Bdoc26a_3233028_1765100/tp5304e008/ros-ex73035957/circular_path_record.bag Version: 2.0 Duration: 10.4s Start: Jul 05 2021 08:09:52.86 (1625486992.86) End: Jul 05 2021 08:10:03.29 (1625487003.29) Size: 8.8 KB Messages: 51 Types: geometry_msgs/Point [4a842b65f413084dc2b10fb484ea7f17] Topics: /circle 51 msgs : geometry_msgs/Point
Load the new rosbag log file.
readerCircle = rosbagreader('circular_path_record.bag');Create a time series for the coordinates.
tsCircle = timeseries(readerCircle,'X','Y');
Plot the coordinates.
plot(tsCircle.Data(:,1),tsCircle.Data(:,2))
axis equal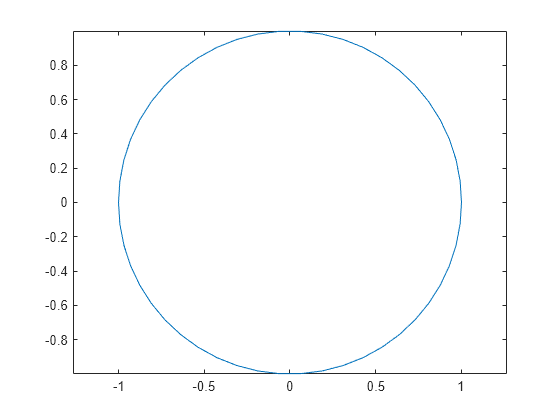
Create a rosbagwriter object and a rosbag file in the current working directory. Specify the compression format of the message chunks and the size of each message chunk.
bagwriter = rosbagwriter("bagfile.bag", ... "Compression","lz4",... "ChunkSize",1500)
bagwriter =
rosbagwriter with properties:
FilePath: '/tmp/Bdoc26a_3233028_1743803/tp26e6ebba/ros-ex26181333/bagfile.bag'
StartTime: 0
EndTime: 0
NumMessages: 0
Compression: 'lz4'
ChunkSize: 1500 Bytes
FileSize: 4117 Bytes
Start node and connect to ROS master.
rosinit
Launching ROS Core... Done in 0.56744 seconds. Initializing ROS master on http://172.20.225.188:50698. Initializing global node /matlab_global_node_41340 with NodeURI http://dcc2971517glnxa64:36835/ and MasterURI http://localhost:50698.
Write a single log to the rosbag file.
timeStamp = rostime("now"); rosMessage = rosmessage("nav_msgs/Odometry"); write(bagwriter,"/odom",timeStamp,rosMessage); bagwriter
bagwriter =
rosbagwriter with properties:
FilePath: '/tmp/Bdoc26a_3233028_1743803/tp26e6ebba/ros-ex26181333/bagfile.bag'
StartTime: 1.7766e+09
EndTime: 1.7766e+09
NumMessages: 1
Compression: 'lz4'
ChunkSize: 1500 Bytes
FileSize: 4172 Bytes
Shut down the ROS network.
rosshutdown
Shutting down global node /matlab_global_node_41340 with NodeURI http://dcc2971517glnxa64:36835/ and MasterURI http://localhost:50698. Shutting down ROS master on http://172.20.225.188:50698.
Remove rosbag writer object from memory and clear the associated object.
delete(bagwriter)
clear bagwriterCreate a rosbagreader object and load all the messages in the rosbag log file. Verify the recently written log.
bagreader = rosbagreader('bagfile.bag')bagreader =
rosbagreader with properties:
FilePath: '/tmp/Bdoc26a_3233028_1743803/tp26e6ebba/ros-ex26181333/bagfile.bag'
StartTime: 1.7766e+09
EndTime: 1.7766e+09
NumMessages: 1
AvailableTopics: [1×3 table]
AvailableFrames: {0×1 cell}
MessageList: [1×4 table]
bagreader.AvailableTopics
ans=1×3 table
NumMessages MessageType MessageDefinition
___________ _________________ __________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
/odom 1 nav_msgs/Odometry {'std_msgs/Header Header↵ uint32 Seq↵ Time Stamp↵ char FrameId↵char ChildFrameId↵geometry_msgs/PoseWithCovariance Pose↵ geometry_msgs/Pose Pose↵ geometry_msgs/Point Position↵ double X↵ double Y↵ double Z↵ geometry_msgs/Quaternion Orientation↵ double X↵ double Y↵ double Z↵ double W↵ double[36] Covariance↵geometry_msgs/TwistWithCovariance Twist↵ geometry_msgs/Twist Twist↵ geometry_msgs/Vector3 Linear↵ double X↵ double Y↵ double Z↵ geometry_msgs/Vector3 Angular↵ double X↵ double Y↵ double Z↵ double[36] Covariance↵'}
Input Arguments
Version History
Introduced in R2021b