levinson
Levinson-Durbin recursion
Description
Examples
Estimate the coefficients of an autoregressive process given by
a = [1 0.1 -0.8 -0.27];
Generate a realization of the process by filtering white noise of variance 0.4.
v = 0.4; w = sqrt(v)*randn(15000,1); x = filter(1,a,w);
Estimate the correlation function. Discard the correlation values at negative lags. Use the Levinson-Durbin recursion to estimate the model coefficients. Verify that the prediction error corresponds to the variance of the input.
[r,lg] = xcorr(x,'biased');
r(lg<0) = [];
[ar,e] = levinson(r,numel(a)-1)ar = 1×4
1.0000 0.0772 -0.7954 -0.2493
e = 0.3909
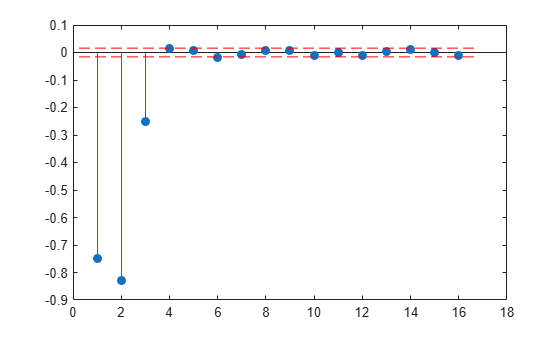
Estimate the reflection coefficients for a 16th-order model. Verify that the only reflection coefficients that lie outside the 95% confidence bounds are the ones that correspond to the correct model order. See AR Order Selection with Partial Autocorrelation Sequence for more details.
[~,~,k] = levinson(r,16); stem(k,'filled') conf = sqrt(2)*erfinv(0.95)/sqrt(15000); hold on [X,Y] = ndgrid(xlim,conf*[-1 1]); plot(X,Y,'--r') hold off
Generate the coefficients of an autoregressive process given by
a = [1 0.1 -0.8 -0.27];
Generate five realizations of the process by filtering white noise with different variances.
nr = 5; v = rand(1,nr)
v = 1×5
0.8147 0.9058 0.1270 0.9134 0.6324
w = sqrt(v).*randn(15000,nr); x = filter(1,a,w);
Estimate the correlation function. Discard cross-correlation terms and correlation values at negative lags. Use the Levinson-Durbin recursion to estimate the prediction errors for the correct model order and verify that the prediction errors correspond to the variances of the input noise signals.
[r,lg] = xcorr(x,'biased');
[~,e] = levinson(r(lg>=0,1:nr+1:end),numel(a)-1)e = 5×1
0.7957
0.9045
0.1255
0.9290
0.6291
Input Arguments
Output Arguments
Algorithms
The Levinson-Durbin recursion is an algorithm for finding an all-pole IIR filter with a
prescribed deterministic autocorrelation sequence. It has applications in filter design,
coding, and spectral estimation. The filter that levinson produces is
minimum phase.
levinson solves the symmetric Toeplitz system of linear
equations
where
r = [r(1) ... r(n + 1)]
is the input autocorrelation vector, and
r(i)* denotes the complex
conjugate of r(i). The input r is
typically a vector of autocorrelation coefficients where lag 0 is the first element,
r(1).
Note
If r is not a valid autocorrelation sequence, the
levinson function might return NaNs even if the
solution exists.
The algorithm requires O(n2) flops and is thus much more efficient than the MATLAB® backslash command for large n. However, the
levinson function uses \ for low orders to provide
the fastest possible execution.
References
[1] Ljung, Lennart. System Identification: Theory for the User. 2nd Ed. Upper Saddle River, NJ: Prentice Hall, 1999.
Extended Capabilities
Version History
Introduced before R2006a