Sistemas mecánicos
Explore ejemplos que ilustran modelado, control y simulación de sistemas mecánicos.
Información relacionada
Ejemplos destacados

Sistema modelo de masa-resorte-amortiguador con controlador
En este ejemplo se muestra un modelo de masa-resorte-amortiguador controlado. Un controlador ajusta la fuerza sobre la masa para que su posición rastree una señal de comando. La velocidad inicial para la masa es de 10 metros por segundo. El controlador ajusta la fuerza aplicada por la fuerza de partida para rastrear los cambios de escalón en la señal de entrada.
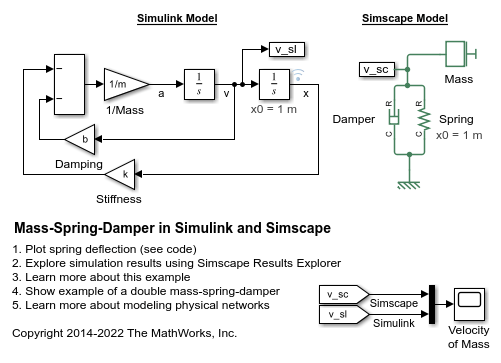
Modelo de masa-resorte-amortiguador en Simulink y Simscape
Este ejemplo compara un modelo de masa-resorte-amortiguador que utiliza conexiones físicas y bloques de Simscape™ y con un modelo que utiliza señales y bloques de Simulink®.

Modelo de masa-resorte-amortiguador doble en Simulink y Simscape
En este ejemplo se muestran dos modelos de masa-resorte-amortiguador doble. Uno utiliza los bloques de entrada y salida de Simulink® y el otro utiliza redes físicas de Simscape™.

Sistema mecánico simple
En este ejemplo se muestra un modelo de un sistema que conecta el movimiento rotacional con el traslacional. Una palanca de suma dirige una carga que consiste en una masa, fricción viscosa y un resorte conectado a su junta C. La junta B está suspendida sobre dos resortes rotacionales conectados al punto de referencia por medio de una rueda y un eje, y una caja de cambios. La junta A está conectada a un par motor de partida por medio de una caja de cambios y un mecanismo con rueda y eje.
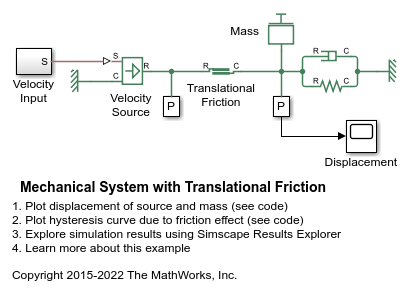
Sistema mecánico con fricción traslacional
En este ejemplo se muestra una masa unida a un resorte y a un amortiguador de viscosidad. Una fuente de velocidad ideal dirige la masa a través del elemento de fricción. El perfil de movimiento de la fuente se selecciona de tal forma que representar el desplazamiento de la masa respecto al desplazamiento provocado por la fuente produce una curva de histéresis típica.

Sistema mecánico con tope rígido traslacional
Este ejemplo muestra dos masas conectadas por un tope rígido. Una fuente de velocidad ideal dirige la masa 1. A medida que la entrada de velocidad cambia la dirección, la masa Mass 2 quedará en reposo hasta que la masa Mass 1 alcance el otro extremo de la respuesta negativa modelada por el tope rígido traslacional Translational Hard Stop. Representar el desplazamiento de la masa Mass 2 respecto al desplazamiento de la masa Mass 1 produce una curva de histéresis típica.
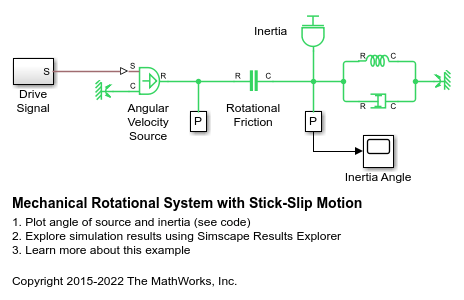
Sistema mecánico de rotación con oscilaciones con efecto stick-slip
Este modelo muestra un sistema mecánico de rotación con fricción por oscilaciones con efecto stick-slip. Se conecta una inercia a un punto fijo mediante el resorte y el amortiguador. La inercia se mueve por una fuente de velocidad a través de un elemento de fricción por oscilaciones con efecto stick-slip. El elemento de fricción presenta una diferencia entre la fricción de arranque y la de Coulomb, lo que provoca oscilaciones con efecto stick-slip de la inercia.

Mecanismo de acoplamiento
Este ejemplo muestra el uso del bloque Lever de Simscape™ en un mecanismo de acoplamiento. Lever 1 y Lever 4 son palancas de primer género con el punto de apoyo en el extremo. Lever 3 es una palanca de segundo género con el punto de apoyo en el medio. Lever 2 es una palanca de suma dirigida por la primera y la tercera palanca.

Péndulo en coordenadas cartesianas y polares
En este ejemplo se muestran dos implementaciones diferentes de un péndulo planar.

Cálculo de Pi usando masas en colisión
Este ejemplo recurre a un conocido problema de física para demostrar el rendimiento del solver mediante la captura de decenas de miles de eventos instantáneos que se producen en menos de un segundo. En una trayectoria unidimensional, una masa grande se acerca a una masa pequeña acotada por una pared. Cuando la masa grande choca con la masa pequeña, esta última rebota en la pared y vuelve hacia la masa grande. Cada colisión es perfectamente elástica. A medida que la masa grande se va acercando a la pared, las colisiones con la masa pequeña se producen cada vez más rápido, hasta que la masa grande cambia de dirección y acaba moviendose en dirección contraria lo suficientemente rápido como para que la masa pequeña nunca la alcance.