Aplicaciones de automatización industrial
Simulink® permite a los fabricantes de equipos industriales crear especificaciones ejecutables en forma de modelos que ofrecen una dirección de diseño clara a diversos grupos de ingeniería. Estos modelos de ejemplo ilustran las aplicaciones de la automatización industrial.
Ejemplos destacados
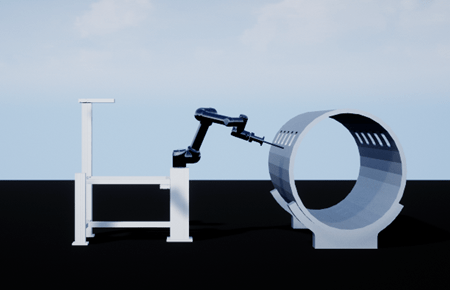
Model and Control Robot Dynamics to Automate Virtual Assembly Line
Extends the Smart4i virtual commissioning applications to accommodate robot dynamics in the system framework to automate assembly line operation. This example models the digit twin of the Smart4i setup and controls the dynamics of robots in the assembly line, which helps develop a more realistic simulation environment. The virtual assembly line consists of four components: two robotic workcells, connected by a shuttle track and a conveyor belt. The first robot, Robot 1, is a Comau Racer V3 and places cups onto the shuttle. The second robot, Robot 2, is a Mitsubishi RV-4F and places balls in the cups. The shuttle track system consists of four shuttles which continuously move to Robot 1, then to Robot 2, followed by a slider. A slider then delivers those cups containing balls to a container. This example downloads the assembly line CAD data, robot model files and shuttle trajectory data. For a detailed system overview, see Automate Virtual Assembly Line with Two Robotic Workcells (Robotics System Toolbox).
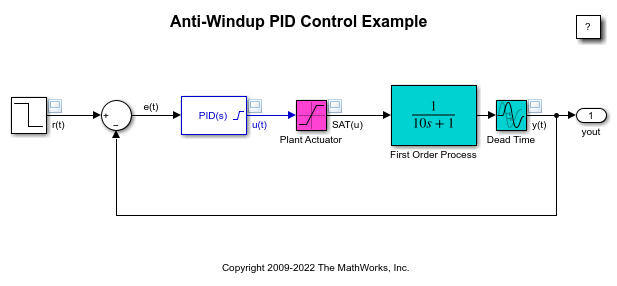
Control anti-windup usando el bloque PID Controller
Este ejemplo muestra cómo utilizar procedimientos anti-windup para evitar la integración windup en controladores PID cuando se saturan los actuadores. El bloque PID Controller de Simulink® incorpora dos métodos anti-windup integrados, back-calculation y clamping, así como un modo de seguimiento para gestionar escenarios industriales más complejos. El bloque PID Controller admite varias funcionalidades que permiten gestionar problemas relacionados con controladores windup, frecuentes en escenarios industriales.

Bumpless Control Transfer Between Manual and PID Control
Achieve bumpless control transfer when switching from manual control to proportional integral derivative (PID) control. The model uses the PID Controller block in Simulink® to control a first-order process with dead-time.
Two Degree-of-Freedom PID Control for Setpoint Tracking
Regulate the speed of an electric motor using two degree-of-freedom PID control with set-point weighting. This model uses the PID Controller (2DOF) block. The model changes the setpoint values between 60 and 30 rpm. To convert the units to rad/s for use in the PID controller, the model uses a Signal Conversion block.
Job Scheduling and Resource Estimation for a Manufacturing Plant
Model a manufacturing plant. The plant consists of an assembly line that processes jobs based on a pre-determined schedule. This example walks you through a workflow for:
Shape Tracing Manipulator with Simulink 3D Animation
Model and visualize the shape tracing manipulator in the 3D environment.