Memory
Generar como salida una entrada de paso de tiempo anterior
Bibliotecas:
Simulink /
Discrete
HDL Coder /
Discrete
Descripción
El bloque Memory retiene y retrasa su entrada por un paso de tiempo de integración principal. Cuando se coloca en un subsistema iterable, retiene y retrasa su entrada por una iteración. Este bloque acepta señales continuas y discretas. El bloque acepta una entrada y genera una salida. Cada señal puede ser un escalar, un vector, una matriz o un arreglo N-D. Si la entrada no es un escalar, el bloque retiene y retrasa todos los elementos de la entrada durante el mismo paso de tiempo.
Puede especificar la salida del bloque para el primer paso de tiempo con el parámetro Initial condition. Si selecciona este parámetro con precaución, puede evitar un comportamiento de salida no deseado. Aún así, no se puede especificar el tiempo de muestreo. El tiempo de muestreo del bloque se hereda o depende del solver. El parámetro Inherit sample time determina si el tiempo de muestreo se hereda o depende del solver.
Sugerencia
Evite utilizar el bloque Memory cuando estas dos condiciones sean verdaderas:
El modelo utiliza el solver de paso variable
ode15suode113.La entrada al bloque cambia durante la simulación.
Cuando el bloque Memory hereda un tiempo de muestreo discreto, el bloque es análogo al bloque Unit Delay. No obstante, el bloque Memory no admite el registro de estado. Si es necesario registrar el estado final, use un bloque Unit Delay en su lugar.
Comparación con bloques similares
Los bloques Memory, Unit Delay y Zero-Order Hold proporcionan una funcionalidad similar, pero tienen distintas prestaciones. Además, la finalidad de cada bloque es diferente.
Esta tabla muestra el uso recomendado para cada bloque.
| Bloque | Finalidad del bloque | Ejemplos de referencia |
|---|---|---|
| Unit Delay | Implemente un retraso utilizando un tiempo de muestreo discreto que especifique. El bloque acepta y genera como salida señales con un tiempo de muestreo discreto. |
|
| Memory | Implemente un retraso de un paso de tiempo de integración principal. En condiciones ideales, el bloque acepta señales continuas (o fijas con paso de tiempo secundario) y genera como salida una señal fija con paso de tiempo secundario. |
|
| Zero-Order Hold | Convierta una señal de entrada con un tiempo de muestreo continuo a una señal de salida con un tiempo de muestreo discreto. |
Cada bloque tiene las siguientes características.
| Característica | Memory | Unit Delay | Zero-Order Hold |
|---|---|---|---|
| Especificación de condición inicial | Sí | Sí | No, porque la salida del bloque en el instante t = 0 debe coincidir con el valor de entrada. |
| Especificación de tiempo de muestreo | No, porque el bloque solo puede heredar tiempo de muestreo del bloque controlador o del solver usados para todo el modelo. | Sí | Sí |
| Soporte para señales basadas en tramas | No | Sí | Sí |
| Soporte para registro de estado | No | Sí | No |
Soporte para bus
El bloque Memory es un bloque apto para bus. La entrada puede ser una señal de bus virtual o no virtual sujeta a las siguientes restricciones:
Initial condition debe ser cero, un escalar distinto de cero o una estructura numérica finita.
Si Initial condition es cero o una estructura y especifica State name, la entrada no puede ser un bus virtual.
Si Initial condition es un escalar distinto de cero, no puede especificar State name.
Para obtener información sobre cómo especificar una estructura de condición inicial, consulte Specify Initial Conditions for Bus Elements.
Todas las señales en una entrada de bus no virtual para un bloque Memory deben tener el mismo tiempo de muestreo, incluso si los elementos del objeto bus asociado especifican tiempos de muestreo heredados. Puede usar un bloque Rate Transition para cambiar el tiempo de muestreo de una señal individual o de todas las señales de un bus. Consulte Modify Sample Times for Nonvirtual Buses y Bloques aptos para bus para obtener más información.
Puede usar un arreglo de buses como señal de entrada para un bloque Memory. Puede especificar el parámetro Initial condition con:
El valor
0. En este caso, todas las señales individuales del arreglo de buses utilizan el valor inicial0.Un arreglo de estructuras que especifica una condición inicial para cada una de las señales individuales del arreglo de buses.
Una estructura escalar que especifica una condición inicial para cada uno de los elementos definidos por el tipo de bus. Utilice esta técnica para especificar las mismas condiciones iniciales para cada uno de los buses del arreglo.
Para obtener detalles sobre cómo definir y usar un arreglo de buses, consulte Group Nonvirtual Buses in Arrays of Buses.
Ejemplos
Este ejemplo muestra cómo usar los bloques Memory y Clock para calcular y mostrar el tamaño del paso en una simulación. El bloque Sum resta el tiempo en el paso de tiempo anterior, que genera el bloque Memory, del paso de tiempo actual, que genera el bloque Clock.

Como no se ha seleccionado Inherit sample time en el bloque Memory, el tiempo de muestreo del bloque depende del tipo de solver para la simulación del modelo. En ese caso, el modelo usa un solver de paso fijo. Por consiguiente, el tiempo de muestreo del bloque Memory es el tamaño de paso del solver o 1.
Si se sustituye el bloque Memory por un bloque Unit Delay, se obtienen los mismos resultados. El bloque Unit Delay hereda un tiempo de muestreo discreto de 1.
Ejemplos ampliados
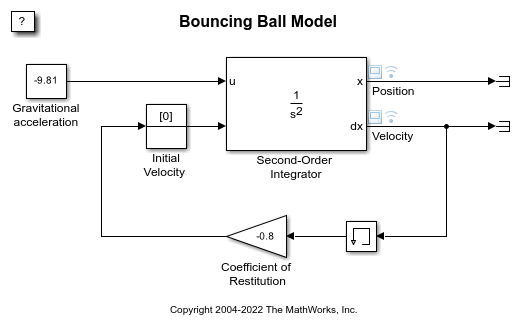
Capture the Velocity of a Bouncing Ball with the Memory Block
The sldemo_bounce example shows how to use the Second-Order
Integrator and Memory blocks to capture the velocity of a bouncing ball just
before it hits the ground.

Implement a Finite-State Machine with the Combinatorial Logic and Memory Blocks
The sldemo_clutch example shows how you can use the Memory
block with the Combinatorial Logic block to implement a finite-state
machine.