Nonlinear Inductor
Inductor with nonideal core

Libraries:
Simscape /
Electrical /
Passive
Description
The Nonlinear Inductor block represents an inductor with a nonideal core. A core may be nonideal due to its magnetic properties and dimensions. To choose between these parameterization options, use the Parameterized by parameter:
Single Inductance (Linear)
These equations define the relationships between voltage, current, and flux,
where:
v is the terminal voltage.
i is the terminal current.
iL is the current through inductor.
Gp is the parasitic parallel conductance.
Nw is the number of winding turns.
Φ is the magnetic flux.
L is the unsaturated inductance.
Single Saturation Point
These equations define the relationships between voltage, current, and flux,
where:
v is the terminal voltage.
i is the terminal current.
iL is the current through inductor.
Gp is the parasitic parallel conductance.
Nw is the number of winding turns.
Φ is the magnetic flux.
Φoffset is the magnetic flux saturation offset.
L is the unsaturated inductance.
Lsat is the saturated inductance.
Magnetic Flux Versus Current Characteristic
These equations define the relationships between voltage, current, and flux,
where:
v is the terminal voltage.
i is the terminal current.
iL is the current through inductor.
Gp is the parasitic parallel conductance.
Nw is the number of winding turns.
Φ is the magnetic flux.
The block determines magnetic flux by using a one-dimensional table lookup, based on the vector of electrical current values and the vector of corresponding magnetic flux values that you provide. You can construct these vectors using negative and positive data, or positive data only. If you use positive data only, the first element of the vector must be 0. The block calculates negative values by rotating the positive data by 180° about (0,0).
Magnetic Flux Density Versus Magnetic Field Strength Characteristic
These equations define the relationships between voltage, current, and flux,
where:
v is the terminal voltage.
i is the terminal current.
iL is the current through inductor.
Gp is the parasitic parallel conductance.
Nw is the number of winding turns.
Φ is the magnetic flux.
B is the magnetic flux density.
H is the magnetic field strength.
le is the effective core length.
Ae is the effective core cross-sectional area.
The block determines the magnetic flux density by one-dimensional table lookup, based on the vector of magnetic field strength values and the vector of corresponding magnetic flux density values that you provide. You can construct these vectors using either negative and positive data, or positive data only. If you use positive data only, the first element of the vector must be 0. The block calculates negative values by rotating the positive data by 180° about (0,0).
Magnetic Flux Density Versus Magnetic Field Strength Characteristic with Hysteresis
These equations define the relationships between voltage, current, and flux,
where:
v is the terminal voltage.
i is the terminal current.
iL is the current through inductor.
Gp is the parasitic parallel conductance.
Nw is the number of winding turns.
Φ is the magnetic flux.
B is the magnetic flux density.
μ0 is the magnetic permeability of a vacuum.
H is the magnetic field strength.
M is the magnetization of the inductor core.
le is the effective core length.
Ae is the effective core cross-sectional area.
The magnetization acts to increase the magnetic flux density, and its value depends on both the current value and the history of the field strength. The block uses the Jiles-Atherton 1, 2] equations to determine M at any given time. This figure shows a typical plot of the resulting relationship between B and H.
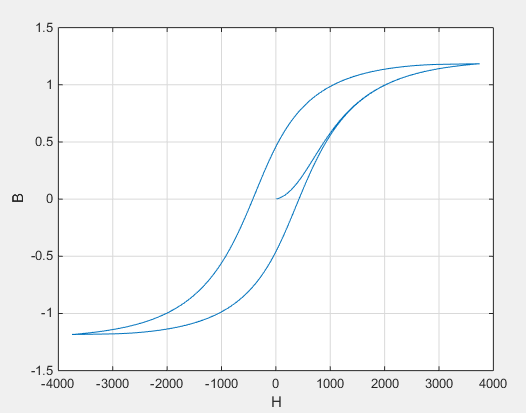
As the field strength increases from H = 0, the plot initially follows an ascending hysteresis curve. At the saturation point, further increases in field intensity no longer cause significant increases in magnetic flux.
As you reduce the magnetic field strength from the saturation point, the plot follows a descending hysteresis curve. The difference between ascending and descending curves is due to the dependence of M on the trajectory history. Physically, the behavior corresponds to magnetic dipoles in the core aligning as the field strength increases, but not then fully recovering to their original position as field strength decreases.
The starting point for the Jiles-Atherton equation is the split of the magnetization effect into two parts, one part that is purely a function of effective field strength Heff and another, irreversible part that depends on history. This equation defines the relative contributions of the anhysteretic magnetization Man and the irreversible magnetization Mirr to the total magnetization M,
where c is the coefficient for reversible magnetization.
This equation relates Man to the equivalent magnetizationHeff:
The function defines a saturation curve with limiting values ±Ms, where:
Ms is the saturation magnetization.
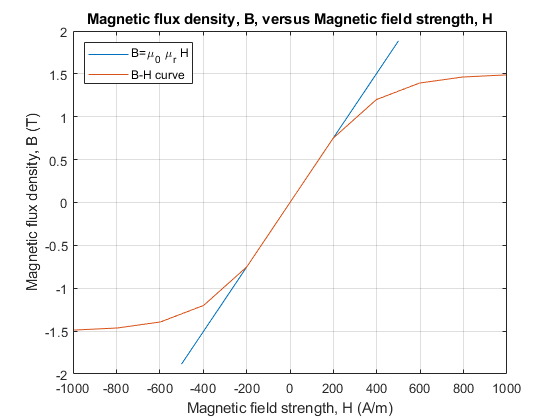
a is the anhysteretic magnetization coefficient, which determines the point of saturation. It approximately describes the average of the two hysteretic curves.
In the Nonlinear Inductor block mask, you provide values for when Heff = 0 and a point [H1, B1] on the anhysteretic B-H curve. The block uses these values to determine values for a and Ms.
The Jiles-Atherton model defines the irreversible term by a partial derivative with respect to field strength,
where:
K is the bulk coupling coefficient, which shapes the irreversible characteristic.
α is the inter-domain coupling factor.
Comparison of the equation with a standard first-order differential equation reveals that as you change the total field strength H, the irreversible term Mirr attempts to track the reversible term Man, but with a variable tracking gain of . The tracking error acts to create the hysteresis at the points where δ changes sign.
This equation defines the effective field strength of an anhysteretic curve,
The value of α affects the shape of the hysteresis curve. Larger values act to increase the B-axis intercepts. However, the stability term must be positive for δ > 0 and negative for δ < 0. There are therefore limits on the values of α that you can provide. A typical maximum value is of the order 1e-3.
You can determine representative values for the equation coefficients using this procedure:
Provide a value for the Anhysteretic B-H gradient when H is zero parameter ( when Heff = 0) and a data point [H1, B1] on the anhysteretic B-H curve. From these values, the block initialization determines values for α and Ms.
Set the Coefficient for reversible magnetization, c parameter to achieve correct initial B-H gradient when starting a simulation from [H B] = [0 0]. The value of c is approximately the ratio of this initial gradient to the Anhysteretic B-H gradient when H is zero. The value of c must be greater than 0 and less than 1.
Set the Bulk coupling coefficient, K parameter to the approximate magnitude of H when B = 0 on the ascending hysteresis curve.
Start with a very small value for the Inter-domain coupling factor, alpha parameter, and gradually increase it to tune the value of B when crossing the H = 0 line. A typical value is in the range of 1e-4 to 1e-3. Values that are too large cause the gradient of the B-H curve to tend to infinity, which is nonphysical and generates a run-time assertion error.
To get a good match against a predefined B-H curve, iterate on these four steps.
Examples
Nonlinear Inductor Characteristics
A comparison of nonlinear inductor behavior for different parameterizations. Starting with fundamental parameter values, the parameters for linear and nonlinear representations are derived. These parameters are then used in a Simscape™ model and the simulation outputs compared.
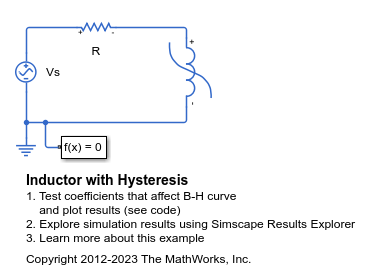
Inductor with Hysteresis
How modifying the equation coefficients of the Jiles-Atherton magnetic hysteresis equations affects the resulting B-H curve. The simulation parameters are configured to run four complete AC cycles with initial field strength (H) and magnetic flux density (B) both set to zero.
Ports
Conserving
Parameters
References
[1] Jiles, D. C. and D. L. Atherton. "Theory of ferromagnetic hysteresis." Journal of Magnetism and Magnetic Materials 61, no. 1–2 (September 1986): 48–60.https://doi.org/10.1016/0304-8853(86)90066-1.
[2] Jiles, D. C. and D. L. Atherton. “Ferromagnetic hysteresis.” IEEE® Transactions on Magnetics 19, no. 5 (September 1983): 2183–2185. https://doi.org/10.1109/TMAG.1983.1062594.
Extended Capabilities
Version History
Introduced in R2012b