Stereo Vision
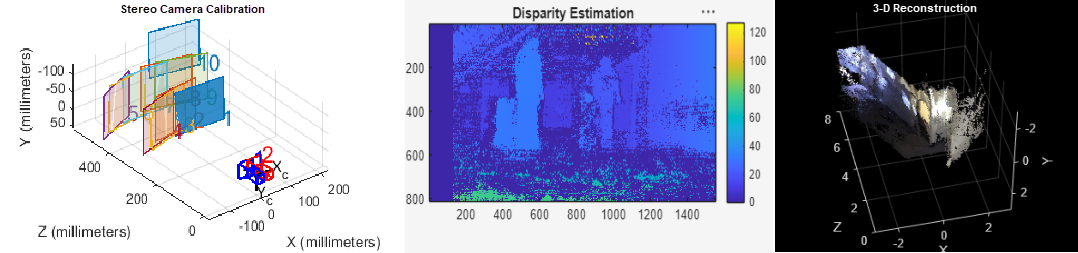
Stereo vision enables depth estimation by comparing two views of the same scene. The output of this computation is a 3-D point cloud where each point corresponds to a matched pixel in one of the images. The workflow begins with stereo camera calibration, which estimates intrinsic and extrinsic parameters using the Stereo Camera Calibrator app. Once calibrated, stereo image rectification aligns image pairs onto a common plane, simplifying correspondence matching for disparity estimation. For an introduction, see Using the Stereo Camera Calibrator App. To perform stereo rectification on uncalibrated images, see Uncalibrated Stereo Image Rectification.
You can compute disparity maps using classical algorithms such as block matching or semi-global matching. Then, you can use the disparity maps to perform dense 3-D scene reconstruction by applying geometric principles like triangulation and epipolar geometry. For more information, see Reconstruct 3-D Scene from Stereo Image Pair Using Semi-Global Matching and Compare RAFT Optical Flow and Semi-Global Matching for Stereo Reconstruction.
Stereo vision also enables advanced applications such as visual SLAM and real-world distance measurements. For more information, see Stereo Visual SLAM for UAV Navigation in 3D Simulation and Measure Real-World Distances to Objects Using a Stereo-Camera.
Apps
| Stereo Camera Calibrator | Estimate geometric parameters of a stereo camera |
Functions
Topics
- What Is Stereo Reconstruction?
Reconstruct 3-D scene using stereo vision.
- What Is Camera Calibration?
Estimate the parameters of a lens and image sensor of an image or video camera.
- Coordinate Systems
Specify pixel Indices, spatial coordinates, and 3-D coordinate systems.
- Using the Stereo Camera Calibrator App
Calibrate a stereo camera, which you can then use to recover depth from images.
Featured Examples

Reconstruct 3-D Scene from Stereo Image Pair Using Semi-Global Matching
Reconstruct the 3-D world coordinates of points corresponding to each pixel from a disparity map.
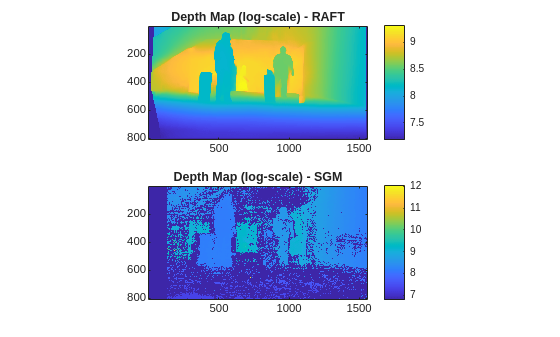
Compare RAFT Optical Flow and Semi-Global Matching for Stereo Reconstruction
Compare deep learning based RAFT optical flow model and classical semi-global matching algorithm for disparity estimation and stereo reconstruction applications.
Measure Real-World Distances to Objects Using a Stereo-Camera
Detect a face and compute the distance between it in a camera scene and the camera.

Uncalibrated Stereo Image Rectification
Compute rectification of two uncalibrated images.
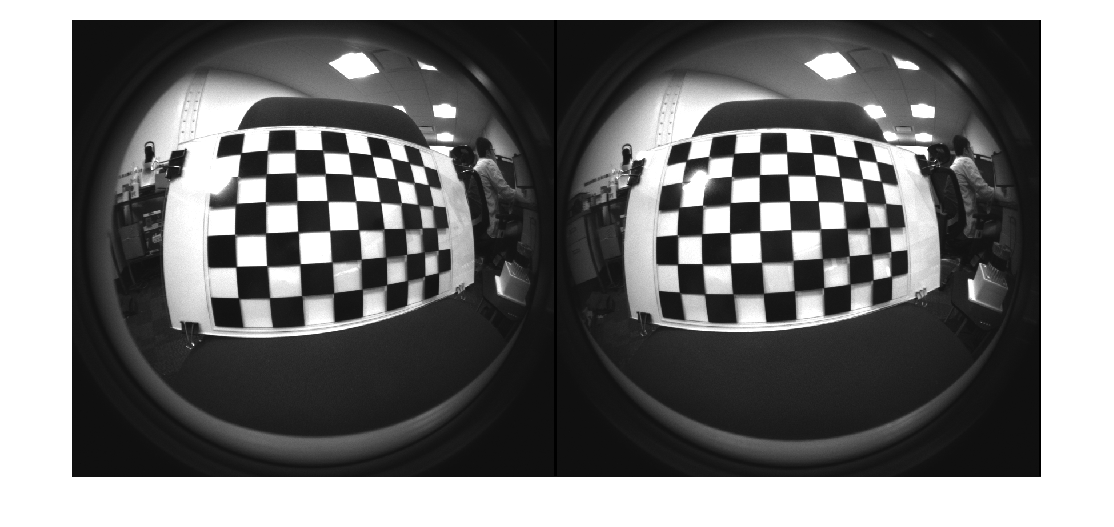
Stereo Fisheye Camera Calibration
Calibrate a stereo fisheye camera by determining each camera's intrinsic parameters and estimate the baseline between them.

Performant and Deployable Stereo Visual SLAM with Fisheye Images
Use fisheye image data from a stereo camera to perform VSLAM and generate multi-threaded C/C++ code.

Stereo Visual SLAM for UAV Navigation in 3D Simulation
Develop a visual SLAM algorithm for a UAV equipped with a stereo camera.

Stereo Visual Simultaneous Localization and Mapping
Process image data from a stereo camera to build a map of an outdoor environment and estimate the trajectory of the camera.

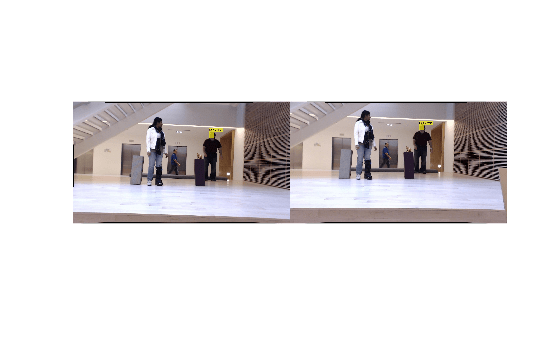
Depth Estimation from Stereo Video
Detect people in video taken with a calibrated stereo camera and determine distance from the camera.

Code Generation for Depth Estimation from Stereo Video
Use the MATLAB® Coder™ to generate C code for a MATLAB function, which uses the stereoParameters object produced by Stereo Camera Calibrator app or the estimateCameraParameters function. The example explains how to modify the MATLAB code in the Depth Estimation from Stereo Video example to support code generation.