Esta página fue traducida automáticamente.
Complete una encuesta de 1 minuto sobre la calidad de esta traducción.
Desarrollo de circuitos integrados más eficientes con diseño basado en modelos
Por Kyoji Marumoto e Hiroshi Nishide, ROHM Co. Ltd.
En respuesta a la creciente presión competitiva, los fabricantes de circuitos integrados (CI) están acortando los plazos de entrega a medida que los diseños se vuelven más complejos y aumentan las expectativas de clientes en cuanto a calidad y rendimiento. Muchos fabricantes están descubriendo que los enfoques de diseño tradicionales, con verificación basada en documentos de especificación y múltiples prototipos antes de la versión de producción final, ahora son demasiado lentos para mantenerse al día con el ritmo de la industria.
En ROHM, hemos incorporado el diseño basado en modelos al proceso de desarrollo de circuitos integrados (CI) para aplicaciones de control de motores, aplicaciones de sensores y sistemas de suministro de energía. Con modelado y simulación de diseños de circuitos integrados (CI) de señal mixta, plantas y sistemas microelectromecánicos (MEMS) en Simulink® logramos verificar las especificaciones de diseño en un nivel general antes de continuar con el diseño en nivel de circuito. Este enfoque reduce el cambios, tiempo de desarrollo y cantidad de prototipos, y permite mejorar la calidad general del diseño. Por ejemplo, generando automáticamente código Verilog® de los modelos que hemos creado y verificado en Simulink, podemos reducir el tiempo de verificación de un mes a unos pocos días. Esto no solo mejora la eficiencia del desarrollo, sino que mejora la calidad al reducir el número de errores de implementación a cero. Con el diseño basado en modelos, podemos crear un prototipo de un producto una sola vez, que ya ha verificado la especificación en nivel de modelo y confirmado que las funciones y características en nivel de circuito cumplen con las especificaciones de diseño, en lugar de tres o cuatro veces, y pasar directamente del prototipo a la producción en masa.
En este artículo se presentan los campos de motores y sensores.
Diseño basado en modelos para circuitos integrados de control de motores
Al desarrollar circuitos integrados para aplicaciones de control de motores, nuestros equipos comienzan el proceso de diseño modelando el motor que se va a controlar. Modelamos las características mecánicas y eléctricas del motor en Simulink usando ecuaciones de movimiento y la ecuación de voltaje, y luego usamos MATLAB.® para ajustar los parámetros del modelo en función de los valores medidos de un motor real. Dependiendo del modelo de motor diseñado por nuestros equipos, también podemos incorporar los efectos de saturación magnética por los controles de detección inductiva y los efectos de wow y flutter debido a la desalineación del eje. Como parte del modelo de planta, incluimos un modelo de los transistores del controlador del motor que creamos con Simscape™. Este modelo de controlador permite analizar características transitorias, como la oscilación de corriente al inicio de la modulación por ancho de pulso que es causada por la capacitancia parásita en el devanado del motor.
También modelamos el controlador del motor en Simulink y luego ejecutamos simulaciones en nivel de sistema con el controlador y la planta juntos para verificar la velocidad, la posición y el aumento de las funciones de control del diseño. Después de verificar el diseño del controlador de esta manera, utilizamos Fixed-Point Designer™ para convertir los algoritmos de control a punto fijo. Luego generamos Verilog RTL sintetizable a partir del modelo con HDL Coder™, acelerando la implementación y eliminando el riesgo de introducir errores de codificación que encontrábamos anteriormente con la codificación manual.
Desarrollo de dispositivos MEMS con generación de modelos DPI-C
Para proyectos que involucran sensores MEMS y circuitos integrados de sensores asociados, utilizamos un proceso de desarrollo muy similar al que usamos con los circuitos integrados de control de motores. Sin embargo, en lugar de realizar pruebas para caracterizar un motor, utilizamos herramientas de análisis electromagnético 3D y análisis estructural para caracterizar el dispositivo MEMS y luego ajustamos los parámetros identificados a través de este proceso a un modelo de Simulink del dispositivo. Alternativamente, realizamos la identificación de la función de transferencia y la aproximación de regresión múltiple en MATLAB, luego usamos la función de transferencia como modelo del dispositivo.
Creamos un modelo de Simulink del IC del sensor que, al igual que el modelo del controlador del motor, sirve como una especificación ejecutable del diseño. A través de simulaciones en nivel de sistema de Simulink, verificamos esta especificación de manera temprana antes de refinar el diseño en la plataforma Cadence® Virtuoso®.
En nuestro flujo de trabajo de diseño de MEMS, podemos realizar un paso de verificación adicional que no es parte de nuestro flujo de trabajo de motor. En concreto, utilizamos HDL Verifier™ con Embedded Coder® para generar un modelo de SystemVerilog DPI-C a partir de nuestro modelo de Simulink del dispositivo MEMS (Figura 1). Luego usamos este modelo de SystemVerilog dentro del entorno de Cadence para validar el diseño de CI completo, incluidos amplificadores, convertidores analógico-digital y lógica de procesamiento digital, a medida que continuamos elaborándolo antes de la verificación final. Esta técnica no solo aumenta la eficiencia del desarrollo, sino que también ayuda a garantizar la calidad del diseño porque tenemos una verificación constante del diseño, primero en Simulink y luego en Cadence Virtuoso.
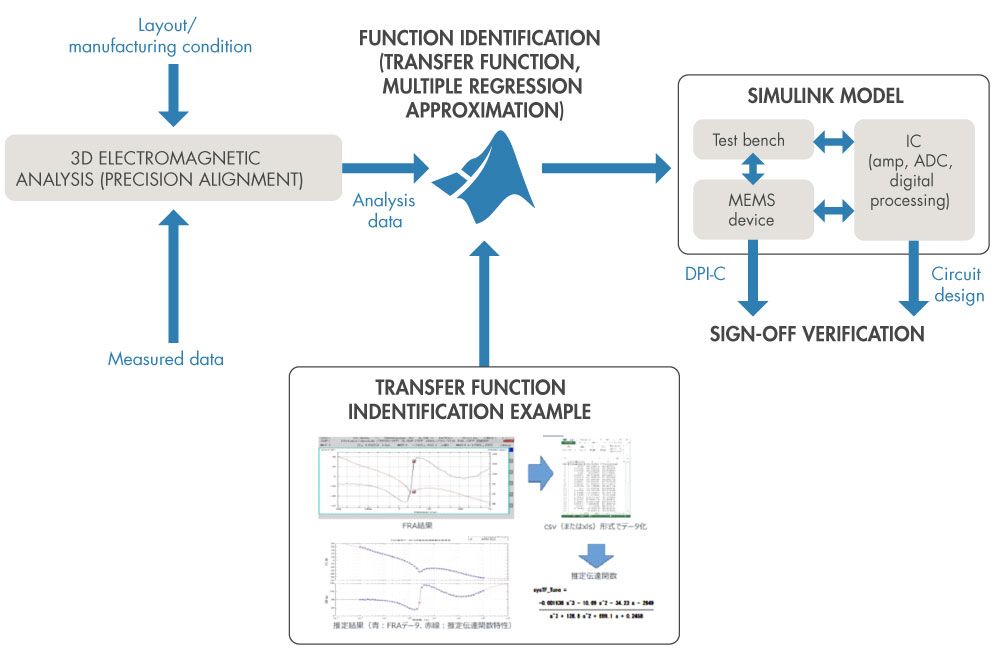
Figura 1. Diagrama de flujo de trabajo para la generación de modelos de DPI-C.
Evaluación de FPGA-in-the-loop de clientes
Muchos de nuestros clientes consideran que la posibilidad de evaluar un producto ROHM en desarrollo es una ventaja significativa en sus propios procesos de desarrollo. Para estos clientes, generamos código HDL a partir de nuestro modelo IC de Simulink utilizando HDL Coder y lo implementamos en una placa de evaluación FPGA. Los clientes pueden luego utilizar la placa para evaluar sus diseños de hardware. Como alternativa, pueden utilizar HDL Verifier para realizar simulaciones FPGA-in-the-loop con sus propios modelos de Simulink en nivel de sistema para análisis transitorio y optimización del diseño. Con ambos enfoques, nuestra propiedad intelectual está protegida, ya que solo compartimos la implementación del FPGA, no nuestros recursos de diseño de origen.
Grupo de diseño basado en modelos en ROHM
Para ayudar a los equipos de productos de ROHM a adoptar el diseño basado en modelos, formamos el Grupo de diseño basado en modelos, un equipo de ingenieros con amplia experiencia en diseño. Este grupo desarrolla activos que facilitan el modelado, simulación y generación de código en Simulink como parte de enforque top-down de diseño de circuitos integrados. Los activos incluyen plantillas de modelos, documentación y herramientas para la extracción de parámetros, así como una guía técnica para modelos de motores, modelos MEMS y generación de DPI-C de SystemVerilog.
El grupo también comparte técnicas de modelado e imparte sesiones informativas y de formación internas para ayudar a los equipos a ponerse al día rápidamente. Aunque el grupo inicialmente apuntaba a los equipos de ROHM con base en Japón, ahora está ayudando a los centros de diseño de ROHM en el extranjero a formar equipos que se especializan en proyectos de diseño basado en modelos.
Muchos equipos de ROHM han adoptado fácilmente el diseño basado en modelos, aunque algunos se han mostrado reacios porque no han establecido un entorno de diseño basado en modelos para su campo. Para estos últimos equipos, el grupo de diseño basado en modelos se toma el tiempo para demostrar los beneficios del enfoque y las ventajas obtenidas por los equipos que ya lo utilizan. Más recientemente, hemos creado grupos de trabajo para el desarrollo de circuitos integrados de sensores y motores utilizando Simulink. Los ingenieros de ROHM se unen a estos grupos para compartir información técnica y aprender más sobre temas relevantes para muchos equipos, como modelar controladores MOSFET en Simscape, crear modelos MEMS de alta precisión e identificar la respuesta en frecuencia de los circuitos existentes.
Expansión del diseño basado en modelos en ROHM
El número de equipos que utilizan el diseño basado en modelos dentro de nuestra división está aumentando constantemente. Además, estamos empezando a ver el diseño basado en modelos aplicado en todas las unidades de negocios de la empresa, incluidas las unidades responsables del desarrollo y fabricación de productos de carburo de silicio (SiC) y transistores bipolares de compuerta aislada (IGBT). Recientemente, también hemos visto una mayor demanda por parte de los clientes del sector de automoción de un diseño basado en modelos. ROHM está ahora bien posicionado para satisfacer esta demanda.
Publicado en 2022