evalGoal
Evaluate tuning goals for tuned control system
Description
Examples
Tune a control system with systune, and evaluate the tuning goals with evalGoal.
Open the Simulink® model rct_airframe2.
open_system('rct_airframe2')
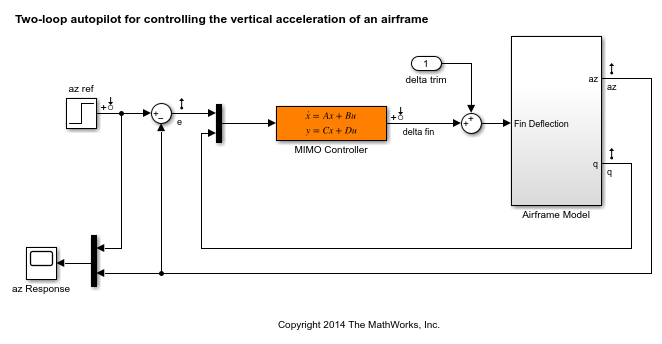
Create tracking, roll-off, stability margin, and disturbance rejection requirements for tuning the control system.
Req1 = TuningGoal.Tracking('az ref','az',1); Req2 = TuningGoal.Gain('delta fin','delta fin',tf(25,[1 0])); Req3 = TuningGoal.Margins('delta fin',7,45); MaxGain = frd([2 200 200],[0.02 2 200]); Req4 = TuningGoal.Gain('delta fin','az',MaxGain);
Create an slTuner interface, and tune the model using these tuning goals.
ST0 = slTuner('rct_airframe2','MIMO Controller'); rng default [ST1,fSoft] = systune(ST0,[Req1,Req2,Req3,Req4]);
Final: Soft = 1.13, Hard = -Inf, Iterations = 96
ST1 is a tuned version of the slTuner interface to the control system. ST1 contains the tuned values of the tunable parameters of the MIMO controller in the model.
Evaluate the margin goal for the tuned system.
[hspec,fval] = evalGoal(Req3,ST1); fval
fval =
0.5140
The normalized value of the tuning goal is less than 1, indicating that the tuned system satisfies the margin requirement. For more information about how the normalized value of this tuning goal is calculated, see the TuningGoal.Margins reference page.
Evaluate the tracking goal for the tuned system.
[hspec,fval] = evalGoal(Req1,ST1); fval
fval =
1.1327
The tracking requirement is nearly met, but the value exceeds 1, indicating a small violation. To further assess the violation, you can use viewGoal to visualize the requirement against the corresponding response of the tuned system.
Input Arguments
Output Arguments
Tips
For MIMO feedback loops, the
LoopShape,MinLoopGain,MaxLoopGain,Margins,Sensitivity, andRejectiongoals are sensitive to the relative scaling of each SISO loop.systunetries to balance the overall loop-transfer matrix while enforcing such goals. The optimal loop scaling is stored in the tuned closed-loop model orslTunerinterfaceTreturned bysystune. For consistency,evalGoal(R,T)applies this same scaling when evaluating the tuning goals. To omit this scaling, useevalGoal(R,clearTuningInfo(T)).Modifying
Tmight compromise the validity of the stored scaling. Therefore, if you make significant modifications toT, retuning is recommended to update the scaling data.
Version History
Introduced in R2017b
See Also
systune | genss | viewGoal | systune (for slTuner) (Simulink Control Design)