Ajuste programático
Puede ajustar los sistemas de control en la línea de comandos con el comando systune. Para ello:
Modele el sistema en MATLAB® con los bloques Control Design para los elementos del controlador ajustables.
Modele el sistema en Simulink® y utilice la interfaz
slTunerpara configurar el modelo para el ajuste (requiere Simulink Control Design™).
La biblioteca de objetivos de ajuste permite capturar los requisitos de diseño de alto nivel para facilitar el ajuste automatizado rápido. La biblioteca incluye objetivos de control estándar, como el seguimiento de referencias, la anulación de perturbaciones, las formas de lazo, el amortiguación de lazo cerrado y los márgenes de estabilidad.
Categorías
- Configuración del ajuste de modelos de Simulink
Configure modelos de Simulink para el ajuste en la línea de comandos
- Configuración del ajuste de modelos de MATLAB
Modele sistemas de control en MATLAB para el ajuste en la línea de comandos
- Objetivos de ajuste
Especifique los requisitos de diseño para el ajuste en la línea de comandos
- Ajuste, análisis y validación
Ajuste los parámetros del sistema de control y analice los resultados en la línea de comandos
Ejemplos destacados
Tune Control Systems Using systune
Use systune to tune structured controllers for a simple
application.

Tune Control Systems in Simulink
At the command line, use systune or
looptune to automatically tune control systems modeled in
Simulink.

Multi-Loop PI Control of a Robotic Arm
Use looptune to tune a multi-loop controller for a 6-DOF robotic arm manipulator.

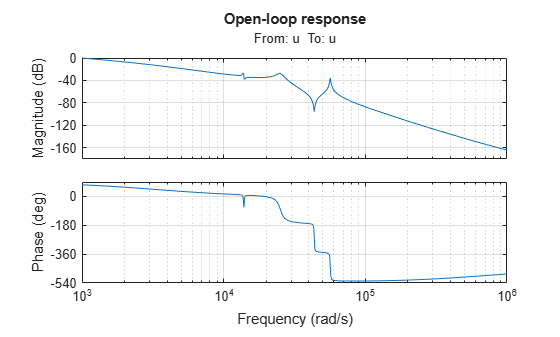
Tune Phase-Locked Loop Using Loop-Shaping Design
Use systune to tune components of a loop filter to improve the
loop bandwidth of a phase-locked loop system.

Feedback Amplifier Design for Voltage-Mode Boost Converter
Design a feedback amplifier for voltage mode boost converter.