lqg
Diseño lineal cuadrático gaussiano (LQG)
Sintaxis
reg = lqg(sys,QXU,QWV)
reg = lqg(sys,QXU,QWV,QI)
reg = lqg(sys,QXU,QWV,QI,'1dof')
reg = lqg(sys,QXU,QWV,QI,'2dof')
reg = lqg(___,'current')
[reg,info] = lqg(___)
Descripción
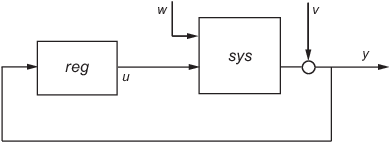
reg = lqg(sys,QXU,QWV) calcula un regulador lineal cuadrático gaussiano (LQG) óptimo reg a partir de un modelo en espacio de estados sys de la planta y las matrices de ponderación QXU y QWV. El regulador dinámico reg utiliza las mediciones y para generar una señal de control u que regula y en torno al valor cero. Utilice retroalimentación positivo para conectar este regulador con la salida de la planta y.
El regulador LQG minimiza la función de coste
en función de las ecuaciones de planta
donde el ruido de proceso w y el ruido de medición v son ruidos blancos gaussianos con covarianza:
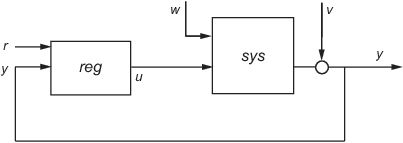
reg = lqg(sys,QXU,QWV,QI) utiliza el comando de punto de referencia r y las mediciones y para generar la señal de control u. reg tiene acción integral para garantizar que y realice el seguimiento del comando r.
El servocontrolador LQG minimiza la función de coste
donde xi es la integral del error de seguimiento r - y. Para los sistemas MIMO, r, y y xi deben tener la misma longitud.
reg = lqg(sys,QXU,QWV,QI,'1dof') calcula un servocontrolador de un grado de libertad que toma e = r - y en lugar de [r ; y] como entrada.
reg = lqg(sys,QXU,QWV,QI,'2dof') equivale a LQG(sys,QXU,QWV,QI) y produce el servocontrolador de dos grados de libertad mostrado anteriormente.
reg = lqg(___,'current') utiliza el estimador de Kalman "actual", que utiliza x[n|n] como la estimación de estado al calcular un regulador LQG para un sistema en tiempo discreto.
[reg,info] = lqg(___) devuelve las matrices de ganancia del controlador y el estimador en la estructura info para cualquiera de las sintaxis anteriores. Puede utilizar las ganancias del controlador y el estimador para, por ejemplo, implementar el controlador en forma de observador. Para más información, consulte Algoritmos.
Ejemplos
Diseños de reguladores y servocontroladores lineales cuadráticos gaussianos (LQG)
En este ejemplo se muestra cómo diseñar un regulador lineal cuadrático gaussiano (LQG), un servocontrolador LQG de un grado de libertad y un servocontrolador LQG de dos grados de libertad para el sistema siguiente.
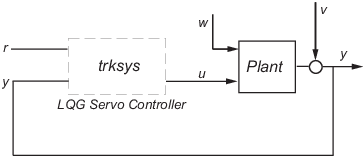
La planta tiene tres estados (x), dos entradas de control (u), tres entradas aleatorias (w), una salida (y), ruido de medición para la salida (v) y las ecuaciones de estado y medición siguientes.
donde
El sistema tiene los siguientes datos de covarianza de ruido:
Para el regulador, utilice la siguiente función de coste para definir el tradeoff entre rendimiento de regulación y esfuerzo de control:
Para los servocontroladores, utilice la siguiente función de coste para definir el tradeoff entre rendimiento del seguidor y esfuerzo de control:
Para diseñar los controladores LQG para este sistema:
Cree el sistema en espacio de estados escribiendo la siguiente instrucción en la ventana de comandos de MATLAB:
A = [0 1 0;0 0 1;1 0 0]; B = [0.3 1;0 1;-0.3 0.9]; C = [1.9 1.3 1]; D = [0.53 -0.61]; sys = ss(A,B,C,D);
Defina los datos de covarianza de ruido y las matrices de ponderación escribiendo los comandos siguientes:
nx = 3; %Number of states ny = 1; %Number of outputs Qn = [4 2 0; 2 1 0; 0 0 1]; Rn = 0.7; R = [1 0;0 2] QXU = blkdiag(0.1*eye(nx),R); QWV = blkdiag(Qn,Rn); QI = eye(ny);
Forme el regulador LQG escribiendo el comando siguiente:
Este comando devuelve el siguiente regulador LQG:KLQG = lqg(sys,QXU,QWV)
A = x1_e x2_e x3_e x1_e -6.212 -3.814 -4.136 x2_e -4.038 -3.196 -1.791 x3_e -1.418 -1.973 -1.766 B = y1 x1_e 2.365 x2_e 1.432 x3_e 0.7684 C = x1_e x2_e x3_e u1 -0.02904 0.0008272 0.0303 u2 -0.7147 -0.7115 -0.7132 D = y1 u1 0 u2 0 Input groups: Name Channels Measurement 1 Output groups: Name Channels Controls 1,2 Continuous-time model.Forme el servocontrolador LQG de un grado de libertad escribiendo el comando siguiente:
Este comando devuelve el siguiente servocontrolador LQG:KLQG1 = lqg(sys,QXU,QWV,QI,'1dof')A = x1_e x2_e x3_e xi1 x1_e -7.626 -5.068 -4.891 0.9018 x2_e -5.108 -4.146 -2.362 0.6762 x3_e -2.121 -2.604 -2.141 0.4088 xi1 0 0 0 0 B = e1 x1_e -2.365 x2_e -1.432 x3_e -0.7684 xi1 1 C = x1_e x2_e x3_e xi1 u1 -0.5388 -0.4173 -0.2481 0.5578 u2 -1.492 -1.388 -1.131 0.5869 D = e1 u1 0 u2 0 Input groups: Name Channels Error 1 Output groups: Name Channels Controls 1,2 Continuous-time model.Forme el servocontrolador LQG de dos grados de libertad escribiendo el comando siguiente:
Este comando devuelve el siguiente servocontrolador LQG:KLQG2 = lqg(sys,QXU,QWV,QI,'2dof')A = x1_e x2_e x3_e xi1 x1_e -7.626 -5.068 -4.891 0.9018 x2_e -5.108 -4.146 -2.362 0.6762 x3_e -2.121 -2.604 -2.141 0.4088 xi1 0 0 0 0 B = r1 y1 x1_e 0 2.365 x2_e 0 1.432 x3_e 0 0.7684 xi1 1 -1 C = x1_e x2_e x3_e xi1 u1 -0.5388 -0.4173 -0.2481 0.5578 u2 -1.492 -1.388 -1.131 0.5869 D = r1 y1 u1 0 0 u2 0 0 Input groups: Name Channels Setpoint 1 Measurement 2 Output groups: Name Channels Controls 1,2 Continuous-time model.
Sugerencias
lqgse puede utilizar tanto para plantas en tiempo continuo como discreto. En tiempo discreto,lqgutiliza x[n|n-1] como su estimación de estado de forma predeterminada. Para utilizar x[n|n] como la estimación de estado y calcular el controlador LQG óptimo, use el argumento de entrada'current'. Para más información acerca de los estimadores de estado, consultekalman.Para calcular el regulador LQG,
lqgutiliza los comandoslqrykalman. Para calcular el servocontrolador,lqgutiliza los comandoslqiykalman.Cuando desee tener más flexibilidad para diseñar reguladores, puede utilizar los comandos
lqr,kalmanylqgreg. Cuando desee tener más flexibilidad para diseñar servocontroladores, puede utilizar los comandoslqi,kalmanylqgtrack. Para más información sobre cómo usar estos comandos y cómo decidir cuándo usarlos, consulte Linear-Quadratic-Gaussian (LQG) Design for Regulation y Linear-Quadratic-Gaussian (LQG) Design of Servo Controller with Integral Action.
Algoritmos
Las ecuaciones de controlador son:
Para tiempo continuo:
Para tiempo discreto:
Estimador con retardo:
Estimador actual:
En este caso,
A, B, C y D son las matrices de espacio de estados del regulador LQG,
reg.xi es la integral del error de seguimiento r - y.
Kx, Kw, Ki, L, Mx y Mw son las matrices de ganancia del controlador y el estimador devueltas en
info.
Historial de versiones
Introducido antes de R2006a