lqr
Diseño de un regulador lineal cuadrático (LQR)
Descripción
[ calcula la matriz de ganancia óptima K,S,P] = lqr(sys,Q,R,N)K, la solución S de la ecuación algebraica de Riccati asociada y los polos de lazo cerrado P para el modelo en espacio de estados en tiempo continuo o tiempo discreto sys. Q y R son las matrices de ponderación para estados y entradas, respectivamente. La matriz de término cruzado N se establece en cero cuando se omite.
[ calcula la matriz de ganancia óptima K,S,P] = lqr(A,B,Q,R,N)K, la solución S de la ecuación algebraica de Riccati asociada y los polos de lazo cerrado P utilizando las matrices de espacio de estados en tiempo continuo A y B. Esta sintaxis solo es válida para modelos en tiempo continuo. Para modelos en tiempo discreto, utilice dlqr.
Ejemplos
pendulumModelCart.mat contiene el modelo en espacio de estados para un péndulo invertido en un carro donde las salidas son el desplazamiento del carro x y el ángulo del péndulo . La entrada de control u es la fuerza horizontal sobre el carro.
Primero, cargue el modelo en espacio de estados sys en el área de trabajo.
load('pendulumCartModel.mat','sys')
Puesto que las salidas son x y , y solo hay una entrada, utilice la regla de Bryson para determinar Q y R.
Q = [1,0,0,0;... 0,0,0,0;... 0,0,1,0;... 0,0,0,0]; R = 1;
Encuentre la matriz de ganancia K utilizando lqr. Puesto que N no se especifica, lqr establece N en 0.
[K,S,P] = lqr(sys,Q,R)
K = 1×4
-1.0000 -1.7559 16.9145 3.2274
S = 4×4
1.5346 1.2127 -3.2274 -0.6851
1.2127 1.5321 -4.5626 -0.9640
-3.2274 -4.5626 26.5487 5.2079
-0.6851 -0.9640 5.2079 1.0311
P = 4×1 complex
-0.8684 + 0.8523i
-0.8684 - 0.8523i
-5.4941 + 0.4564i
-5.4941 - 0.4564i
Aunque la regla de Bryson suele ofrecer resultados satisfactorios, normalmente solo es el punto de partida para un procedimiento de diseño iterativo de prueba y error para ajustar la respuesta del sistema de lazo cerrado en función de los requisitos de diseño.
aircraftPitchModel.mat contiene las matrices de espacio de estados de una aeronave donde la entrada es el ángulo de deflexión del elevador y la salida es el ángulo de inclinación de la aeronave .
Para una referencia de escalón de 0,2 radianes, considere los siguientes criterios de diseño:
Tiempo de subida inferior a 2 segundos
Tiempo de establecimiento inferior a 10 segundos
Error de estado estacionario inferior al 2%
Cargue los datos del modelo en el área de trabajo.
load('aircraftPitchModel.mat')Defina la matriz ponderada de coste de estado Q y la matriz ponderada de control R. Por lo general, puede utilizar la regla de Bryson para definir las matrices ponderadas iniciales Q y R. En este ejemplo, considere el vector de salida C junto con un factor de escalado de 2 para la matriz Q y elija R como 1. R es un escalar porque el sistema solo tiene una entrada.
R = 1
R = 1
Q1 = 2*C'*C
Q1 = 3×3
0 0 0
0 0 0
0 0 2
Calcule la matriz de ganancia utilizando lqr.
[K1,S1,P1] = lqr(A,B,Q1,R);
Compruebe la respuesta al escalón de lazo cerrado con la matriz de ganancia generada K1.
sys1 = ss(A-B*K1,B,C,D); step(sys1)
Puesto que esta respuesta no cumple los objetivos de diseño, aumente el factor de escalado a 25, calcule la matriz de ganancia K2 y compruebe la respuesta al escalón de lazo cerrado para la matriz de ganancia K2.
Q2 = 25*C'*C
Q2 = 3×3
0 0 0
0 0 0
0 0 25
[K2,S2,P2] = lqr(A,B,Q2,R); sys2 = ss(A-B*K2,B,C,D); step(sys2)

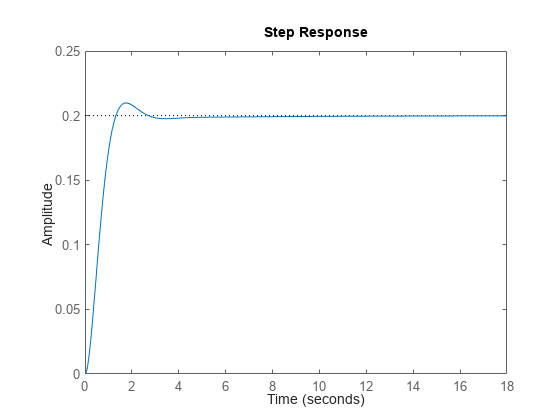
En la gráfica de respuesta al escalón de lazo cerrado, el tiempo de subida, el tiempo de establecimiento y el error de estado estacionario cumplen los objetivos de diseño.
Argumentos de entrada
Argumentos de salida
Limitaciones
Los datos de entrada deben cumplir las siguientes condiciones:
El par (A,B) debe ser estabilizable.
R debe ser definido positivo.
debe ser semidefinido positivo (de manera equivalente, ).
no debe tener ningún modo no observable en el eje imaginario (o círculo unitario en tiempo discreto).
Sugerencias
lqrsoporta los modelos de descriptores conEno singular. La salidaSdelqres la solución de la ecuación algebraica de Riccati para el modelo en espacio de estados explícito equivalente:
Algoritmos
En sistemas en tiempo continuo, lqr calcula el control por retroalimentación de estados que disminuye la función cuadrática de coste
en función de la dinámica del sistema .
Además de la ganancia de retroalimentación de estados K, lqr devuelve la solución S de la ecuación algebraica de Riccati asociada
y los polos de lazo cerrado . La matriz de ganancia K deriva de S utilizando
En sistemas en tiempo discreto, lqr calcula el control por retroalimentación de estados que disminuye
en función de la dinámica del sistema .
En todos los casos, al omitir la matriz de término cruzado N, lqr establece N en 0.
Historial de versiones
Introducido antes de R2006a