lqi
Control lineal cuadrático integral
Sintaxis
[K,S,e] = lqi(SYS,Q,R,N)
Descripción
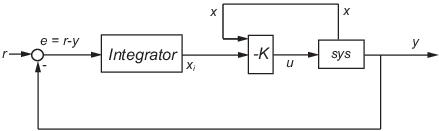
lqi calcula una ley de control por retroalimentación de estados óptima para el lazo de seguimiento que aparece en la siguiente figura.
Para una planta sys con las ecuaciones de espacio de estados (o su equivalente discreto):
el control por retroalimentación de estados presenta el formato
donde xi es la salida del integrador. Esta ley de control garantiza que la salida y rastree el comando de referencia r. Para sistemas MIMO, el número de integradores equivale a la dimensión de la salida y.
[K,S,e] = lqi(SYS,Q,R,N) calcula la matriz de ganancias óptimas K, a partir de un modelo en espacio de estados determinado SYS para la planta y las matrices de ponderación Q, R, N. La ley de control u = –Kz = –K[x;xi] minimiza las siguientes funciones de coste (para r = 0)
para tiempo continuo
para tiempo discreto
En el tiempo discreto, lqi calcula la salida del integrador xi usando la fórmula de Euler explícito
donde Ts es el tiempo de muestreo de SYS.
Al omitir la matriz N, N se define en 0. lqi también devuelve la solución S de la ecuación algebraica de Riccati asociada y los valores propios de lazo cerrado e.
Limitaciones
Para el siguiente sistema en espacio de estados con una planta con integrador aumentado:
Los datos del problema deben cumplir lo siguiente:
El par (A,B) debe ser estabilizable.
R debe ser definido positivo.
debe ser semidefinido positivo (de manera equivalente, ).
no debe tener ningún modo no observable en el eje imaginario (o círculo unitario en tiempo discreto).
Sugerencias
lqi soporta los modelos de descriptores con E no singular. La salida S de lqi es la solución de la ecuación de Riccati para el modelo en espacio de estados explícito equivalente
Referencias
[1] P. C. Young and J. C. Willems, "An approach to the linear multivariable servomechanism problem", International Journal of Control, Volume 15, Issue 5, May 1972 , pages 961–979.
Historial de versiones
Introducido en R2008b