csapi
Interpolación por splines cúbicos
Descripción
Nota
Encontrará un método para interpolar splines cúbicos más sencillo, pero menos flexible usando la app Curve Fitter o la función fit. Consulte Acerca de los splines de suavizado.
pp = csapi(x,y)x que toma los valores y(:,j) en x(j) para j=1:length(x). Los valores y(:,j) pueden ser escalares, vectores, matrices y arreglos n-dimensionales. La función calcula la media de los puntos de datos con el mismo sitio de datos y, a continuación, los ordena según su sitio. Con x como los sitios de datos ordenados resultantes, el spline s satisface las condiciones de contorno not-a-knot, como
donde D3s es la tercera derivada de s.
Si x es un arreglo de celdas de secuencias x1, ..., xm de longitudes n1, ..., nm, y es un arreglo de tamaño [n1,...,nm] (o de tamaño [d,n1,...,nm] si la interpolación es de valor d). En ese caso, pp es el formato ppform de una interpolación por splines cúbicos de m s para esos datos. En particular,
con y .
Para realizar operaciones en este spline cúbico de interpolación, como evaluación, diferenciación y representación, utilice la estructura pp. Para obtener más información, consulte las funciones fnval, fnder y fnplt.
values = csapi(x,y,xx)xx. Esta sintaxis es la misma que la de fnval(csapi(x,y),xx).
Este comando es básicamente la función de MATLAB® spline, que, a su vez, es una versión reducida de la rutina CUBSPL de Fortran en PGS, excepto porque csapi (y ahora también spline) acepta datos de valor vectorial y puede gestionar datos de malla.
Ejemplos
Este ejemplo muestra cómo usar el comando csapi de Curve Fitting Toolbox™ para construir interpolaciones por splines cúbicos.
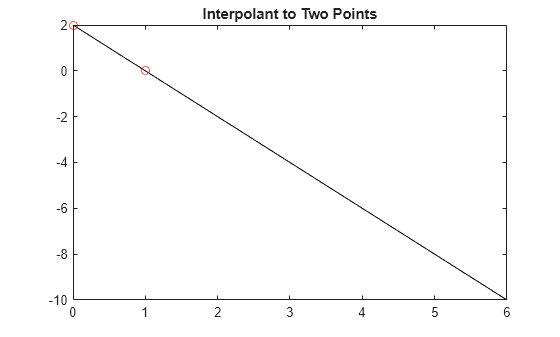
Interpolación para dos puntos
El comando
values = csapi(x,y,xx)
devuelve los valores en xx de la interpolación por splines cúbicos de los datos proporcionados (x,y) utilizando la condición de contorno not-a-knot. Esta interpolación es una función cúbica por tramos con secuencia de salto x, cuyos tramos cúbicos se unen para formar una función con dos derivadas continuas. La condición de contorno "not-a-knot" significa que, en el primer y el último salto interior, incluso la tercera derivada es continua (hasta el error de redondeo).
Especificar solo dos puntos de datos resulta en una interpolación de línea recta.
x = [0 1]; y = [2 0]; xx = linspace(0,6,121); plot(xx,csapi(x,y,xx),'k-',x,y,'ro') title('Interpolant to Two Points')
Interpolación para tres puntos
Si especifica tres puntos de datos, la función genera como salida una parábola.
x = [2 3 5]; y = [1 0 4]; plot(xx,csapi(x,y,xx),'k-',x,y,'ro') title('Interpolant to Three Points')

Interpolación para cinco puntos
En términos más generales, si especifica cuatro o cinco puntos de datos, la función genera como salida un spline cúbico.
x = [1 1.5 2 4.1 5]; y = [1 -1 1 -1 1]; plot(xx,csapi(x,y,xx),'k-',x,y,'ro') title('Cubic Spline Interpolant to Five Points')

Hasta los errores de redondeo, y suponiendo que x es un vector con al menos cuatro entradas, la declaración pp = csapi(x,y) coloca el mismo spline en pp como la siguiente declaración, excepto porque la descripción del spline obtenido de esta segunda forma no utiliza saltos en x(2) y x(n-1):
pp = fn2fm(spapi(augknt(x([1 3:(end-2) end]),4),x,y),"pp");
Como ejemplo bivariado sencillo, represente una interpolación por splines bicúbicos para una wavelet de Ricker.
x =.0001 + (-4:.2:4);
y = -3:.2:3;
[yy,xx] = meshgrid(y,x);
r = pi*sqrt(xx.^2+yy.^2);
z = sin(r)./r;
bcs = csapi({x,y},z);
fnplt(bcs)
axis([-5 5 -5 5 -.5 1])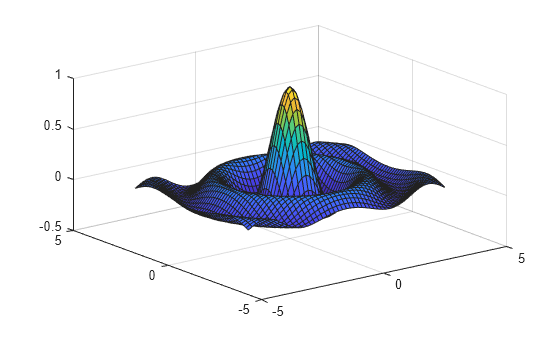
Puesto que MATLAB® considera la entrada z(i,j) como el valor en (x(j),y(i)), el código invierte x e y en la llamada a meshgrid. En su lugar, Curve Fitting Toolbox® sigue el estándar de la teoría de la aproximación mientras que z(i,j) es el valor en (x(i),y(j)).
Por esta razón, hay que tener cuidado cuando representa valores de un spline bivariado de este tipo con ayuda de la función mesh de MATLAB, como se muestra a continuación:
xf = linspace(x(1),x(end),41);
yf = linspace(y(1),y(end),41);
mesh(xf,yf,fnval(bcs,{xf,yf}).')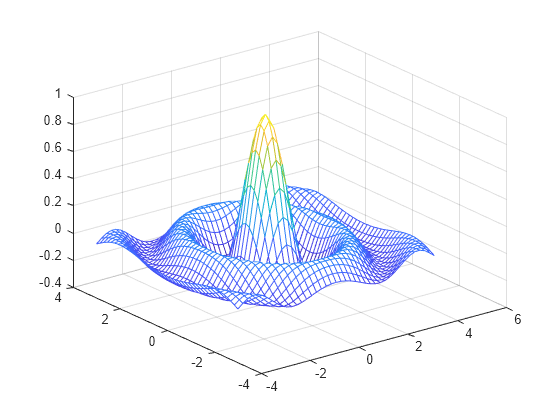
Observe el uso de la traspuesta de la matriz de valores obtenida a partir de fnval.
Argumentos de entrada
Argumentos de salida
Algoritmos
csapi es una implementación de la rutina CUBSPL de Fortran en PGS.
El sistema lineal tridiagonal relevante se construye y resuelve usando la funcionalidad de matrices dispersas de MATLAB.
El algoritmo también utiliza la condición de contorno not-a-knot, forzando a coincidir al primer y al segundo tramo polinomial de la interpolación, así como al penúltimo y al último tramo polinomial.
Historial de versiones
Introducido en R2006b