reset
Syntax
Description
Add-On Required: This feature requires the Scenario Builder for Automated Driving Toolbox add-on.
reset( resets the ego point cloud
extractor object pcExtractor)pcExtractor to its default value, in which no frame
has been extracted from it. Resetting enables you to re-extract frames from the same ego
point cloud extractor object.
Note: This feature also requires the Lidar Toolbox™.
Examples
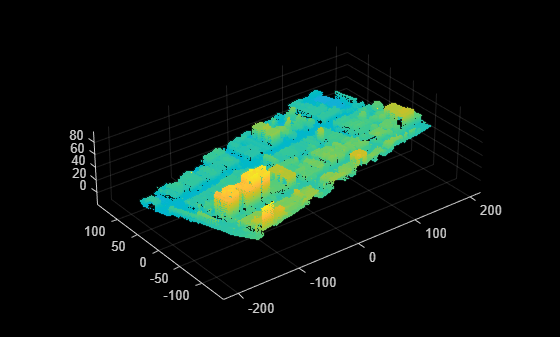
Load recorded point cloud data into the workspace.
ptCloud = pcread("USGS_LPC_CA_NoCAL_3DEP_Supp_Funding_2018_D18_w2276n1958_Cropped_geoReferenced.pcd");Display the point cloud object.
pcshow(ptCloud)
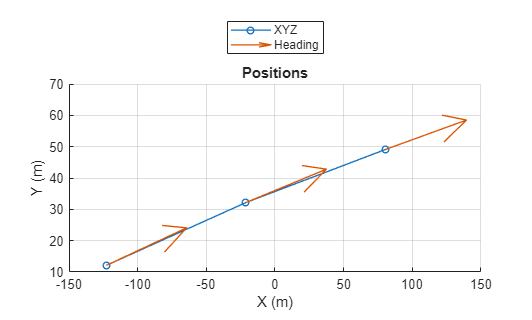
Specify the xyz-coordinates of waypoints to create a trajectory. The trajectory coordinates must be within the spatial range of the loaded point cloud data.
egoTraj = [-122.8437 12.1113 39.8113;
-21.3297 32.1351 33.9599;
80.4809 49.1138 32.9193];Specify timestamps for the waypoints of the trajectory.
timestamps = (1:3)';
Create a trajectory object by using the specified xyz-coordinates and timestamps.
traj = recordedSensorData("trajectory",timestamps,egoTraj);Plot the trajectory object.
plot(traj,HeadingStep=1,ShowHeading=true)
Create an ego point cloud extractor object using the point cloud and trajectory information.
pcExtractor = egoPointCloudExtractor(ptCloud,traj)
pcExtractor =
egoPointCloudExtractor with properties:
Height: 1.6000
MaxRange: 120
SensorParameters: []
PointCloud: [1×1 pointCloud]
Trajectory: [1×1 scenariobuilder.Trajectory]
NumPointClouds: 3
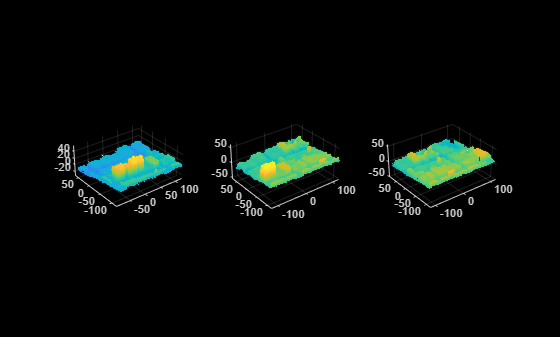
Extract and display point cloud frames from the ego point cloud extractor object until it has no new frames to extract.
figure frame = 0; while(hasFrame(pcExtractor)) pcFrame = extractFrame(pcExtractor); frame = frame + 1; subplot(1,3,frame) pcshow(pcFrame) end
Reset the ego point cloud extractor object.
reset(pcExtractor)
Input Arguments
Version History
Introduced in R2025a