hitprob
Compute Markov chain hitting probabilities
Syntax
Description
Examples
Consider this theoretical, right-stochastic transition matrix of a stochastic process.
Create the Markov chain that is characterized by the transition matrix P.
P = [1 0 0 0; 1/2 0 1/2 0; 0 1/2 0 1/2; 0 0 0 1]; mc = dtmc(P);
Plot a directed graph of the Markov chain. Visually identify the communicating class to which each state belongs by using node colors.
figure;
graphplot(mc,'ColorNodes',true);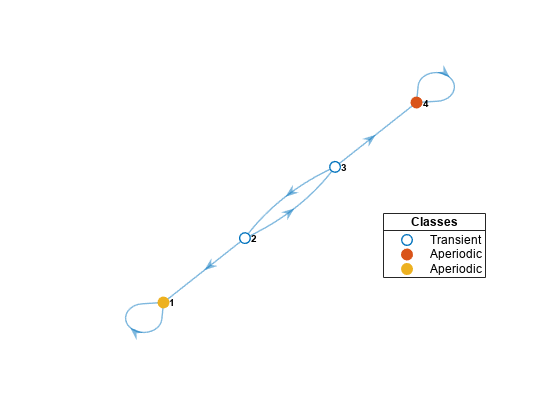
Compute the hitting probabilities for state 1, beginning from each state in the Markov chain.
hp = hitprob(mc,1)
hp = 4×1
1.0000
0.6667
0.3333
0
Because state 1 is the target, the probability of state 1 reaching itself is 1.
State 1 is reachable from states 2 and 3. Therefore, the hitting probabilities for state 1 beginning from those states are positive.
Because state 1 is unreachable from state 4, state 4 has a hitting probability of 0 for state 1. Therefore, state 4 is a remote state with respect to state 1.
Consider this theoretical, right-stochastic transition matrix of a stochastic process.
Create the Markov chain that is characterized by the transition matrix P.
P = [1/2 0 1/2 0 0 0 0
0 1/3 0 2/3 0 0 0
1/4 0 3/4 0 0 0 0
0 2/3 0 1/3 0 0 0
1/4 1/8 1/8 1/8 1/4 1/8 0
1/6 1/6 1/6 1/6 1/6 1/6 0
1/2 0 0 0 0 0 1/2];
mc = dtmc(P);Plot a digraph of the Markov chain mc. Specify node colors representing the hitting probabilities for state 1, beginning from each state in the Markov chain.
hitprob(mc,1,'Graph',true);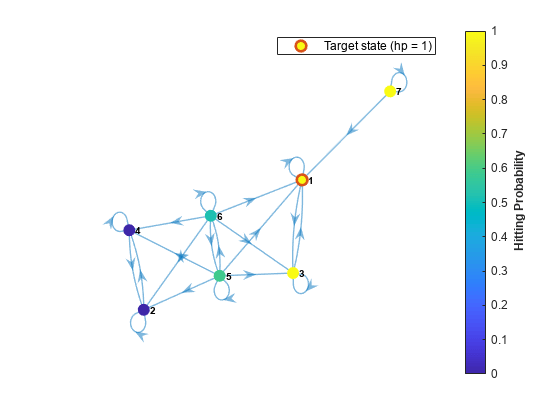
Plot another digraph. Include state 3 as a target state.
hitprob(mc,[1 3],'Graph',true);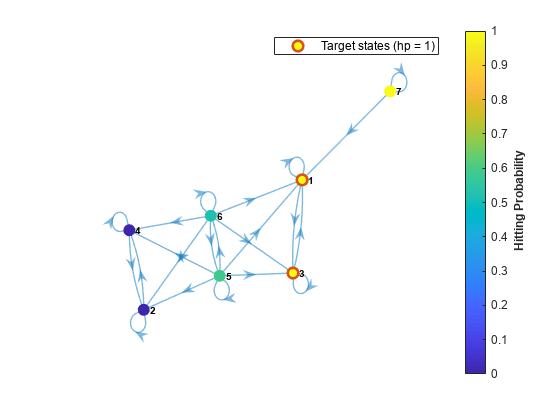
The probability of hitting states 1 or 3 from state 6 is approximately 0.5.
Create a 20-state Markov chain from a random transition matrix containing 375 randomly placed infeasible transitions. An infeasible transition is a transition whose probability of occurring is zero.
rng(4) % For reproducibility mc = mcmix(20,'Zeros',375);
Plot a digraph showing, for each state, the probability of transitioning to the subclass containing states 1 and 2.
target = [1 2];
hitprob(mc,target,'Graph',true);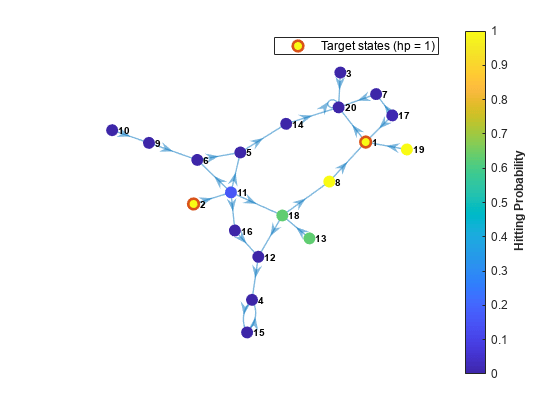
Create a 20-state Markov chain from a random transition matrix containing 375 randomly placed infeasible transitions. Plot a digraph of the Markov chain.
rng(4)
mc = mcmix(20,'Zeros',375);Find a recurrent class in the Markov chain mc by following this procedure:
Classify the states by passing
mctoclassify. Return the array of class membershipsClassStatesand the logical vector specifying whether the classes are recurrentClassRecurrence.Extract the recurrent classes from the array of classes by indexing into the array using the logical vector.
[~,ClassStates,ClassRecurrence] = classify(mc);
s = ClassStates{ClassRecurrence}s = 1×2 string
"4" "15"
States 4 and 15 form a recurrent class.
Plot two digraphs of the Markov chain mc. For the first digraph, use node colors to identify the state classification. For the second digraph, show the probability of absorption into the recurrent class for each state.
subplot(2,1,1) graphplot(mc,'ColorNodes',true) legend off subplot(2,1,2) hitprob(mc,s,'Graph',true);
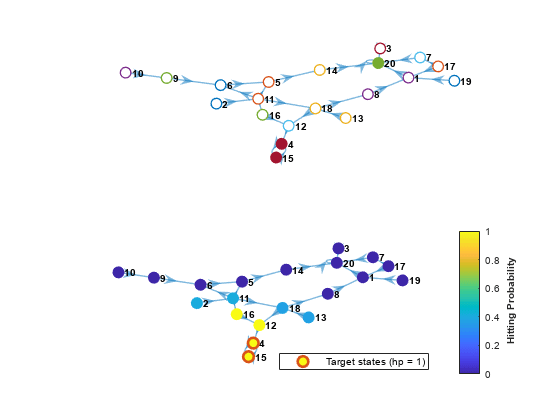
The states to the left of states 2, 11, 18, and 13 are remote with respect to the recurrent class. Therefore, their absorption probability is 0.
Input Arguments
Output Arguments
More About
References
[1] Norris, J. R. Markov Chains. Cambridge, UK: Cambridge University Press, 1997.
Version History
Introduced in R2019b