imhmin
Eliminar mínimos regionales de imágenes utilizando la transformada H-mínimos
Descripción
J = imhmin(I,H)I utilizando la transformada H-mínimos. La transformada H-mínimos reduce la profundidad de todos los mínimos regionales en una cantidad de hasta H. Como resultado, la transformada suprime totalmente los mínimos regionales cuya profundidad sea inferior a H. Los mínimos regionales son píxeles conectados con el mismo valor de intensidad, t, que están rodeados de píxeles con un valor de intensidad superior a t.
Ejemplos
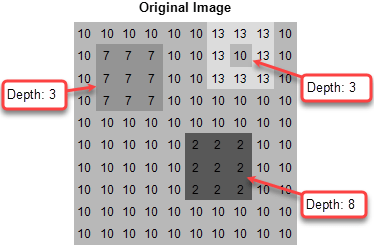
Cree una imagen de muestra de 10 por 10. Añada tres mínimos regionales, donde cada uno conste de un área de píxeles conectados rodeados por valores de intensidad superiores.
a = 10*ones(10,10); a(2:4,2:4) = 7; a(6:8,6:8) = 2; a(1:3,7:9) = 13; a(2,8) = 10;
Esta imagen es una representación en escala de grises de los valores de los píxeles. La profundidad de cada mínimo depende de los valores de los píxeles circundantes.
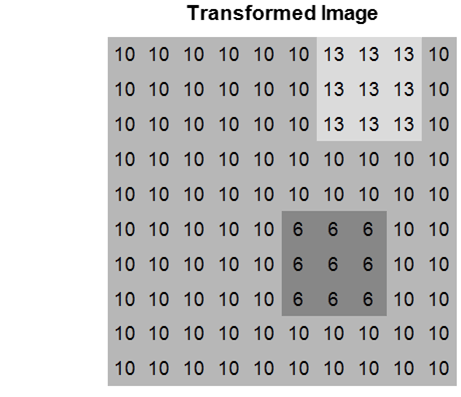
Aplique la transformada H-mínimos que reduce la profundidad de los mínimos regionales en hasta 4.
h = 4; b = imhmin(a,h);
Esta imagen es una representación en escala de grises de la imagen transformada. La transformada suprime totalmente dos de los mínimos. La transformada suprime parcialmente el mínimo más profundo y suma 4 a los valores de intensidad de los píxeles de ese mínimo.
Puede suprimir mínimos regionales superficiales para evitar la sobresegmentación durante la segmentación watershed.
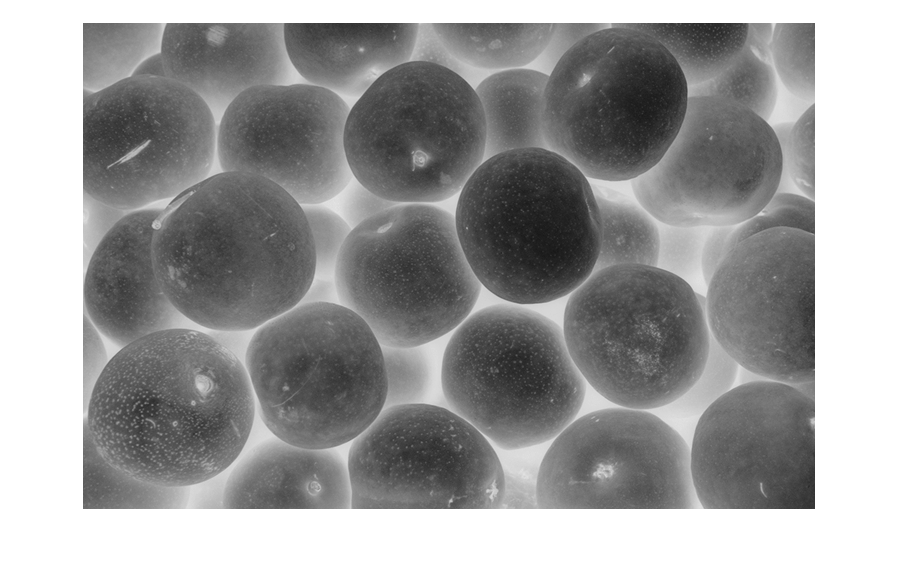
Cargue una imagen RGB de peras que desee segmentar. Convierta la imagen a escala de grises y muéstrela. El centro de cada pera es claro, lo que corresponde a un máximo regional.
RGB = imread("pears.png");
I = im2gray(RGB);
imshow(I)
En la segmentación watershed, la imagen es análoga a una superficie compuesta por líneas divisorias de aguas y cuencas de captación. Cuando el agua fluye por la superficie, se acumula en las cuencas de captación. En una imagen en escala de grises, los mínimos locales son las cuencas de captación. Para segmentar las peras, invierta la imagen de modo que los centros de las peras se conviertan en los mínimos regionales.
Icomp = imcomplement(I); imshow(Icomp)
Muestre la imagen invertida como una superficie 3D en la que la tercera dimensión de cada píxel es su valor de intensidad. Las regiones más profundas de cada pera tienen la parte inferior puntiaguda, lo que indica muchos mínimos regionales superficiales, como cuencas de captación en las que se puede acumular el agua.
surf(Icomp,EdgeColor="none")
colormap(gray)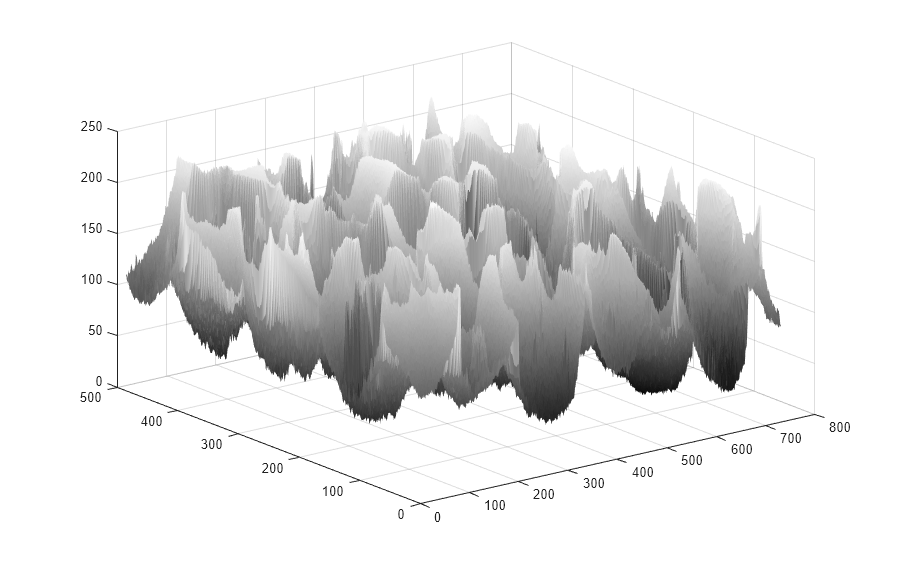
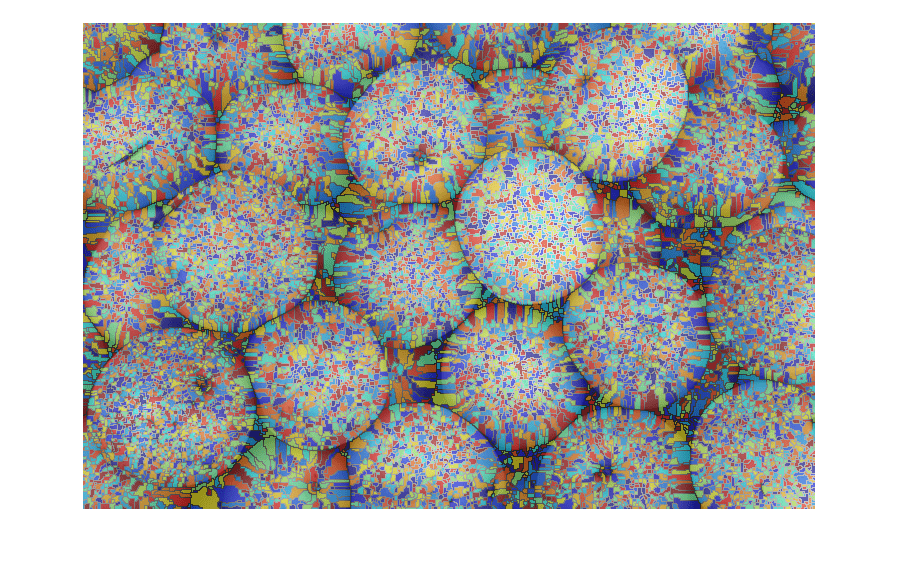
Segmente la imagen sin filtrar y muestre el resultado como una superposición de etiquetas. La imagen está sobresegmentada, lo que significa que hay muchas máscaras pequeñas en lugar de una máscara para cada pera.
L = watershed(Icomp); overlay = labeloverlay(I,L); imshow(overlay)
Suprima los mínimos superficiales aplicando la transformada H-mínimos. El valor de h se ha determinado utilizando el método de prueba y error. Cambie el valor para ver cómo afecta el valor de h al resultado de la segmentación.
h =  30;
Ifilt = imhmin(Icomp,h);
30;
Ifilt = imhmin(Icomp,h);Muestre la imagen filtrada como una superficie 3D.
surf(Ifilt,EdgeColor="none")
colormap(gray)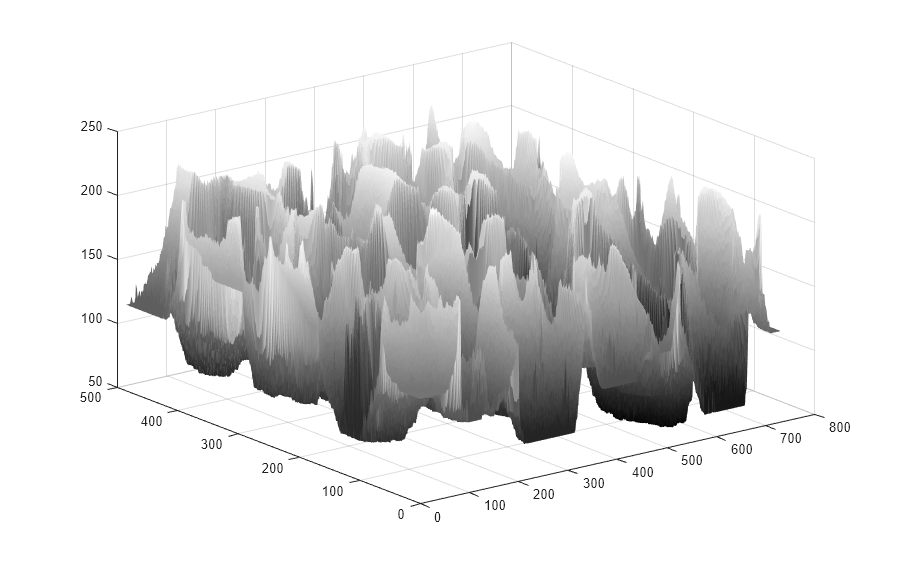
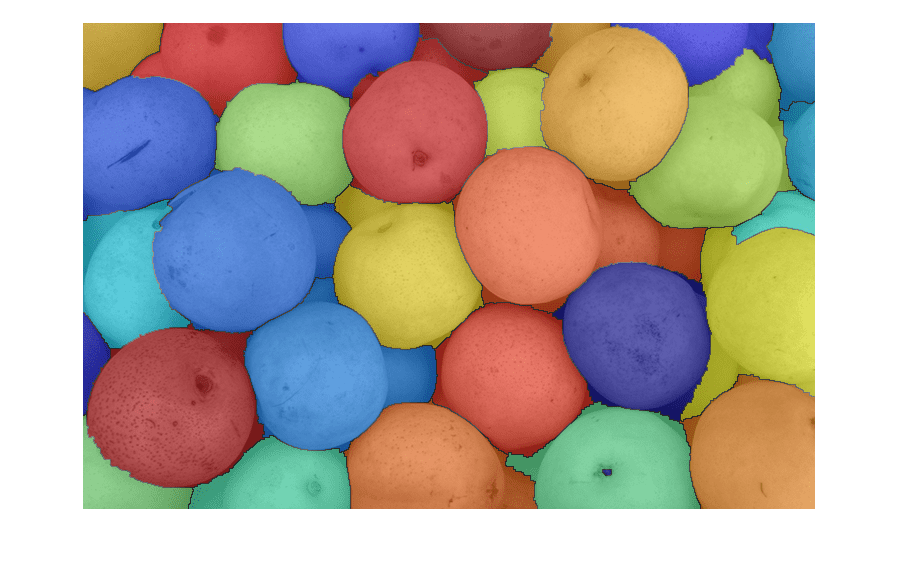
Segmente la imagen filtrada y muestre el resultado. La imagen contiene aproximadamente una máscara para cada pera en primer plano.
Lfilt = watershed(Ifilt); overlayfilt = labeloverlay(I,Lfilt); imshow(overlayfilt)
Argumentos de entrada
Imagen de entrada, especificada como arreglo numérico de cualquier dimensión.
Tipos de datos: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
Transformada H-mínimos, especificada como escalar no negativo.
Tipos de datos: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
Conectividad de píxeles, especificada como uno de los siguientes valores de la tabla. La conectividad por defecto es 8 para imágenes 2D y 26 para imágenes 3D.
Valor | Significado | |
|---|---|---|
Conectividades bidimensionales | ||
| Los píxeles se consideran conectados si comparten bordes. El entorno de un píxel son los píxeles adyacentes en las direcciones horizontal y vertical. |
El píxel actual se muestra en gris. |
| Los píxeles se consideran conectados si comparten bordes o vértices. El entorno de un píxel son los píxeles adyacentes en las direcciones horizontal, vertical y diagonal. |
El píxel actual se muestra en gris. |
Conectividades tridimensionales | ||
| Los píxeles se consideran conectados si comparten caras. El entorno de un píxel son los píxeles adyacentes en:
|
El píxel actual se muestra en gris. |
| Los píxeles se consideran conectados si sus caras o bordes se tocan. El entorno de un píxel son los píxeles adyacentes en:
|
El píxel actual es el centro del cubo. |
| Los píxeles se consideran conectados si sus caras, bordes o vértices se tocan. El entorno de un píxel son los píxeles adyacentes en:
|
El píxel actual es el centro del cubo. |





En el caso de dimensiones más grandes, imhmin utiliza el valor por defecto conndef(ndims(I),"maximal")
Tipos de datos: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
Argumentos de salida
Referencias
[1] Soille, P. Morphological Image Analysis: Principles and Applications. Springer-Verlag, 1999, pp. 170-171.
Capacidades ampliadas
Historial de versiones
Introducido antes de R2006a
Consulte también
imhmax | conndef | imextendedmin | imreconstruct | imregionalmin