wiener2
Filtrado adaptativo 2D de eliminación de ruido
La sintaxis wiener2(I,[m n],[mblock nblock],noise) se ha eliminado. Utilice la sintaxis wiener2(I,[m n],noise) en su lugar.
Descripción
J = wiener2(I,[m n],noise)I utilizando un filtro de Wiener adaptativo de paso bajo a nivel de píxel. [m n] especifica el tamaño (m por n) del entorno utilizado para estimar la media y la desviación estándar de la imagen local. Se supone que la potencia del ruido aditivo (ruido blanco gaussiano) es noise.
La imagen de entrada está degradada por el ruido aditivo de potencia constante. wiener2 utiliza un método de Wiener adaptativo por píxeles basado en estadísticas estimadas de un entorno local de cada píxel.
Ejemplos
Este ejemplo muestra cómo usar la función wiener2 para aplicar un filtro de Wiener (un tipo de filtro lineal) a una imagen de forma adaptativa. El filtro de Wiener se adapta a la varianza local de la imagen. Cuando la varianza es grande, wiener2 realiza poco suavizado. Cuando la varianza es pequeña, wiener2 realiza un mayor suavizado.
Este enfoque suele producir mejores resultados que el filtrado lineal. El filtro adaptativo es más selectivo que un filtro lineal comparable, al conservar los bordes y otras partes de alta frecuencia de una imagen. Además, no hay tareas de diseño; la función wiener2 se encarga de todos los cálculos preliminares e implementa el filtro para una imagen de entrada. wiener2, sin embargo, requiere más tiempo de cálculo que el filtrado lineal.
wiener2 funciona mejor cuando el ruido es un ruido aditivo de potencia constante ("blanco"), como el ruido gaussiano. En el ejemplo siguiente se aplica wiener2 a una imagen de Saturno con ruido gaussiano añadido.
Lea la imagen en el área de trabajo.
RGB = imread('saturn.png');Convierta la imagen de color verdadero a escala de grises.
I = im2gray(RGB);
Añada ruido blanco gaussiano a la imagen.
J = imnoise(I,'gaussian',0,0.025);Muestre la imagen con ruido. Dado que la imagen es bastante grande, muestre solo una parte de la misma.
imshow(J(600:1000,1:600));
title('Portion of the Image with Added Gaussian Noise');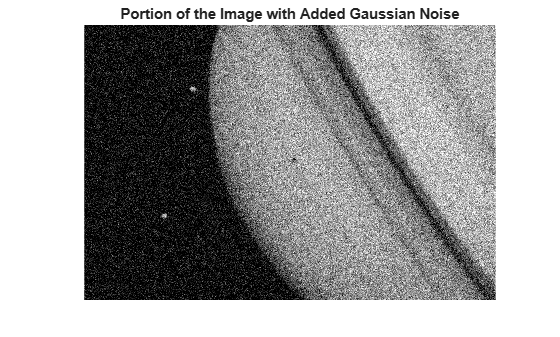
Elimine el ruido con la función wiener2.
K = wiener2(J,[5 5]);
Muestre la imagen procesada. Dado que la imagen es bastante grande, muestre solo una parte de la misma.
figure
imshow(K(600:1000,1:600));
title('Portion of the Image with Noise Removed by Wiener Filter');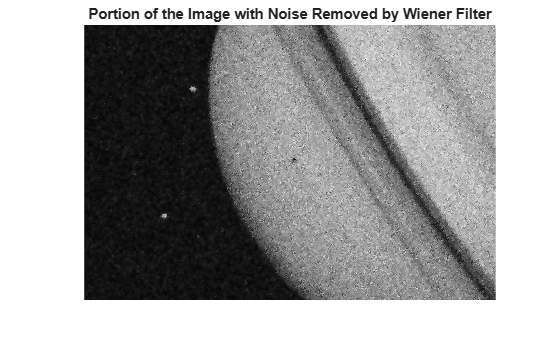
Argumentos de entrada
Argumentos de salida
Algoritmos
wiener2 estima la media local y la varianza alrededor de cada píxel.
y
donde es el entorno local de N por M de cada píxel de la imagen A. wiener2 a continuación crea un filtro de Wiener por píxeles utilizando estas estimaciones,
donde ν2 es la varianza del ruido. Si no se proporciona la varianza del ruido, wiener2 utiliza la media de todas las varianzas locales estimadas.
Referencias
[1] Lim, Jae S. Two-Dimensional Signal and Image Processing, Englewood Cliffs, NJ, Prentice Hall, 1990, p. 548, equations 9.44, 9.45, and 9.46.