ode15s
Resolver ecuaciones diferenciales y DAE rígidas; método de orden variable
Sintaxis
Descripción
[, donde t,y] = ode15s(odefun,tspan,y0)tspan = [t0 tf], integra el sistema de ecuaciones diferenciales de t0 a tf con condiciones iniciales y0. Cada fila del arreglo de solución y se corresponde con un valor devuelto en el vector columna t.
Todos los solvers de ODE de MATLAB® pueden resolver sistemas de ecuaciones con el formato , o problemas que incluyen una matriz de masa, . Todos los solvers utilizan sintaxis similares. El solver ode23s solo puede resolver problemas con una matriz de masa si la matriz de masa es constante. ode15s y ode23t pueden resolver problemas con una matriz de masa que es singular, conocidos como ecuaciones algebraicas diferenciales (DAE). Especifique la matriz de masa utilizando la opción Mass de odeset.
[ también utiliza la configuración de integración definida por t,y] = ode15s(odefun,tspan,y0,options)options, que es un argumento creado utilizando la función odeset. Por ejemplo, utilice las opciones AbsTol y RelTol para especificar tolerancias a errores absolutas y relativas, o la opción Mass para proporcionar una matriz de masa.
[ también encuentra dónde son cero las funciones de (t,y), denominadas funciones de evento. En la salida, t,y,te,ye,ie] = ode15s(odefun,tspan,y0,options)te es el tiempo del evento, ye es la solución en el momento del evento e ie es el índice del evento activado.
Para cada función de evento, especifique si la integración debe terminar en un cero y si la dirección del cruce por cero tiene importancia. Hágalo estableciendo la propiedad 'Events' en una función, como myEventFcn o @myEventFcn, y creando una función correspondiente: [value,isterminal,direction] = myEventFcn(t,y). Para obtener más información, consulte Ubicación de eventos de EDO.
Ejemplos
Las ODE sencillas que tienen un solo componente de solución pueden especificarse como función anónima en la llamada al solver. La función anónima debe aceptar dos entradas (t,y), aunque una de las entradas no se utilice en la función.
Resuelva la ODE
Especifique un intervalo de tiempo de [0 2] y la condición inicial y0 = 1.
tspan = [0 2]; y0 = 1; [t,y] = ode15s(@(t,y) -10*t, tspan, y0);
Represente la solución.
plot(t,y,'-o')
Un ejemplo de un sistema rígido de ecuaciones son las ecuaciones de van der Pol en oscilación de relajación. El ciclo límite tiene regiones en las que los componentes de la solución cambian lentamente y el problema es bastante rígido, alternadas con regiones de cambios muy bruscos donde no es rígido.
El sistema de ecuaciones es:
Las condiciones iniciales son  y
y  . La función
. La función vdp1000 está incluida en MATLAB® y codifica las ecuaciones.
function dydt = vdp1000(t,y) %#ok<INUSD> %VDP1000 Evaluate the van der Pol ODEs for mu = 1000. % % See also ODE15S, ODE23S, ODE23T, ODE23TB. % Jacek Kierzenka and Lawrence F. Shampine % Copyright 1984-2025 The MathWorks, Inc. dydt = [y(2); 1000*(1-y(1)^2)*y(2)-y(1)];
Resolver este sistema usando ode45 con las tolerancias a errores relativas y absolutas (1e-3 y 1e-6, respectivamente) es extremadamente lento, por lo que se requiere varios minutos para resolver y representar la solución. ode45 requiere millones de unidades de tiempo para completar la integración, debido a las áreas de rigidez donde tiene dificultades para cumplir las tolerancias.
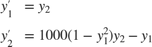
Esta es una gráfica de la solución obtenida por ode45, que tarda mucho tiempo en calcularse. Observe la enorme cantidad de unidades de tiempo necesarias para pasar por áreas de rigidez.
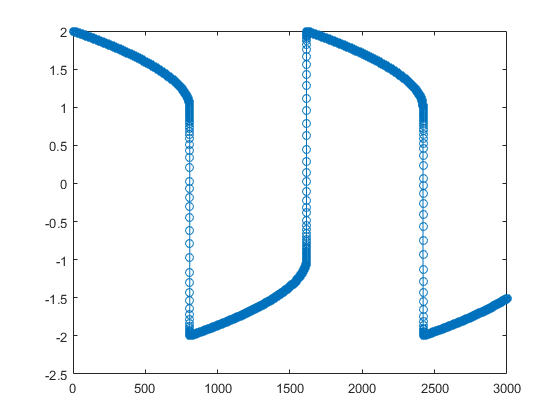
Resuelva el sistema rígido usando el solver ode15s y, después, represente la primera columna de la solución y con respecto a los puntos de tiempo t. El solver ode15s pasa por áreas rígidas con muchos menos pasos que ode45.
[t,y] = ode15s(@vdp1000,[0 3000],[2 0]);
plot(t,y(:,1),'-o')
ode15s funciona solo con funciones que utilizan dos argumentos de entrada, t e y. Sin embargo, puede pasar parámetros extra definiéndolos fuera de la función y pasándolos cuando especifique el identificador de función.
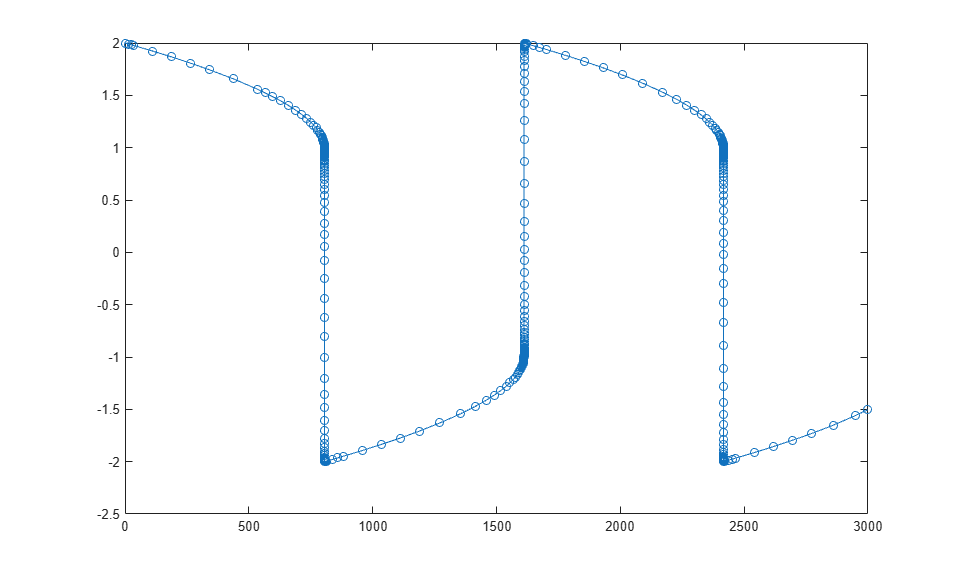
Resuelva la ODE

Si vuelve a escribir la ecuación como un sistema de primer orden, obtendrá

odefcn.m representa este sistema de ecuaciones como una función que acepta cuatro argumentos de entrada: t, y, A y B.
function dydt = odefcn(t,y,A,B)
dydt = zeros(2,1);
dydt(1) = y(2);
dydt(2) = (A/B)*t.*y(1);
Resuelva la ODE utilizando ode15s. Especifique el identificador de función para que pase los valores predefinidos para A y B a odefcn.
A = 1; B = 2; tspan = [0 5]; y0 = [0 0.01]; [t,y] = ode15s(@(t,y) odefcn(t,y,A,B), tspan, y0);
Represente los resultados.
plot(t,y(:,1),'-o',t,y(:,2),'-.')
El solver ode15s es una buena primera elección para la mayoría de problemas rígidos. Sin embargo, es posible que el resto de solvers rígidos sea más eficiente para determinados tipos de problemas. Este ejemplo resuelve una ecuación de prueba rígida usando los cuatro solvers ODE rígidos.
Considere la ecuación de prueba
La ecuación se vuelve cada vez más rígida a medida que la magnitud de aumenta. Utilice y la condición inicial en el intervalo de tiempo [0 0.5]. Con estos valores, el problema es lo suficientemente rígido como para que ode45 y ode23 tengan dificultades para integrar la ecuación. Además, use odeset para pasar la jacobiana constante y activar la visualización de las estadísticas del solver.
lambda = 1e9; y0 = 1; tspan = [0 0.5]; opts = odeset('Jacobian',-lambda,'Stats','on');
Resuelva la ecuación con ode15s, ode23s, ode23t y ode23tb. Haga subgráficas para compararlas.
subplot(2,2,1) tic, ode15s(@(t,y) -lambda*y, tspan, y0, opts), toc
104 successful steps 1 failed attempts 212 function evaluations 0 partial derivatives 21 LU decompositions 210 solutions of linear systems Elapsed time is 1.499378 seconds.
title('ode15s')
subplot(2,2,2)
tic, ode23s(@(t,y) -lambda*y, tspan, y0, opts), toc63 successful steps 0 failed attempts 191 function evaluations 0 partial derivatives 63 LU decompositions 189 solutions of linear systems Elapsed time is 0.460420 seconds.
title('ode23s')
subplot(2,2,3)
tic, ode23t(@(t,y) -lambda*y, tspan, y0, opts), toc95 successful steps 0 failed attempts 125 function evaluations 0 partial derivatives 28 LU decompositions 123 solutions of linear systems Elapsed time is 0.237496 seconds.
title('ode23t')
subplot(2,2,4)
tic, ode23tb(@(t,y) -lambda*y, tspan, y0, opts), toc71 successful steps 0 failed attempts 167 function evaluations 0 partial derivatives 23 LU decompositions 236 solutions of linear systems Elapsed time is 0.231518 seconds.
title('ode23tb')
Todos los solvers rígidos funcionan bien, pero ode23s completa la integración con el menor número de pasos y se ejecuta de la forma más rápida para este problema concreto. Dado que se especifica la jacobiana constante, ninguno de los solvers necesita calcular derivadas parciales para calcular la solución. Especificar la jacobiana beneficia principalmente a ode23s, dado que normalmente evalúa la jacobiana en cada paso.
Para problemas de rigidez generales, el rendimiento de los solvers rígidos varía en función del formato del problema y las opciones especificadas. Proporcionar la matriz jacobiana o el patrón de dispersión siempre mejora la eficiencia del solver para problemas rígidos. Pero, dado que los solvers rígidos utilizan la jacobiana de manera diferente, la mejora puede variar de manera significativa. En la práctica, si un sistema de ecuaciones es muy grande o necesita resolverse muchas veces, vale la pena investigar el rendimiento de los diferentes solvers para minimizar el tiempo de ejecución.
La ecuación de van der Pol es una ODE de segundo orden
Resuelva la ecuación de van der Pol con utilizando ode15s. La función vdp1000.m está incluida en MATLAB® y codifica las ecuaciones. Especifique una sola salida para devolver una estructura que contiene información sobre la solución, como el solver y los puntos de evaluación.
tspan = [0 3000]; y0 = [2 0]; sol = ode15s(@vdp1000,tspan,y0)
sol = struct with fields:
solver: 'ode15s'
extdata: [1×1 struct]
x: [0 1.4606e-05 2.9212e-05 4.3818e-05 1.1010e-04 1.7639e-04 2.4267e-04 3.0896e-04 4.5006e-04 5.9116e-04 7.3226e-04 8.7336e-04 0.0010 0.0012 0.0013 0.0015 0.0017 0.0018 0.0021 0.0024 0.0027 0.0030 0.0033 0.0044 0.0055 0.0066 … ] (1×592 double)
y: [2×592 double]
stats: [1×1 struct]
idata: [1×1 struct]
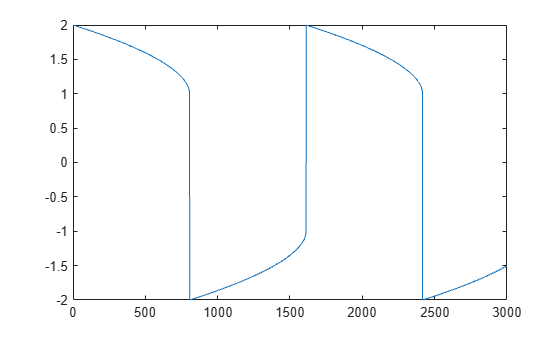
Utilice linspace para generar 2500 puntos en el intervalo [0 3000]. Evalúe el primer componente de la solución en estos puntos utilizando deval.
x = linspace(0,3000,2500); y = deval(sol,x,1);
Represente la solución.
plot(x,y)
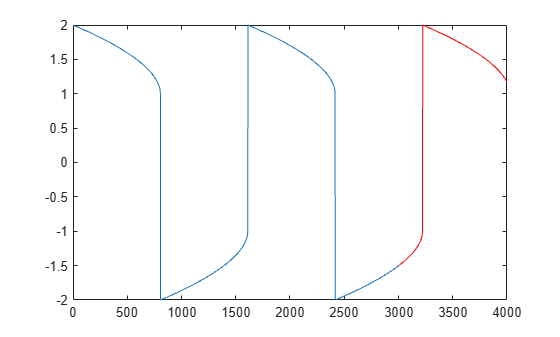
Amplíe la solución a utilizando odextend y añada el resultado a la gráfica original.
tf = 4000; sol_new = odextend(sol,@vdp1000,tf); x = linspace(3000,tf,350); y = deval(sol_new,x,1); hold on plot(x,y,'r')
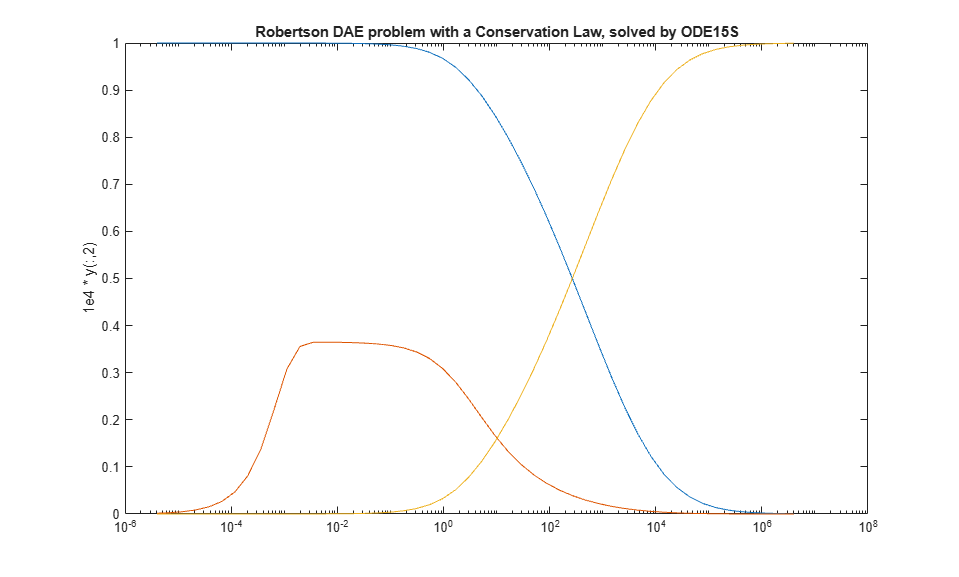
Este ejemplo reformula un sistema de ODE como un sistema de ecuaciones algebraicas diferenciales (DAE). El problema de Robertson que se encuentra en hb1ode.m es un problema de prueba clásico para programas que resuelven ODE rígidas. El sistema de ecuaciones es
hb1ode resuelve este sistema de ODE hasta el estado estacionario con las condiciones iniciales  ,
,  y
y  . Pero las ecuaciones también cumplen una ley de conservación lineal,
. Pero las ecuaciones también cumplen una ley de conservación lineal,

En términos de la solución y las condiciones iniciales, la ley de conservación es

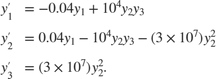
El sistema de ecuaciones se puede reescribir como un sistema de DAE usando la ley de conservación para determinar el estado de  . Esto reformula el problema como el sistema de DAE
. Esto reformula el problema como el sistema de DAE

El índice diferencial de este sistema es 1, dado que solo se requiere una única derivada de para convertir esto en un sistema de ODE. Por lo tanto, no se requieren más transformaciones antes de resolver el sistema.
La función robertsdae codifica este sistema de DAE. Guarde robertsdae.m en la carpeta actual para ejecutar el ejemplo.
function out = robertsdae(t,y)
out = [-0.04*y(1) + 1e4*y(2).*y(3)
0.04*y(1) - 1e4*y(2).*y(3) - 3e7*y(2).^2
y(1) + y(2) + y(3) - 1 ];
El código de ejemplo completo para esta formulación del problema de Robertson está disponible en hb1dae.m.
Resuelva el sistema de DAE usando ode15s. Las condiciones iniciales consistentes para y0 son obvias de acuerdo con la ley de conservación. Utilice odeset para establecer las opciones:
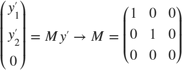
Utilice una matriz de masa constante para representar el lado izquierdo del sistema de ecuaciones.
Establezca la tolerancia a errores relativa en
1e-4.Utilice una tolerancia a errores absoluta de
1e-10para el segundo componente de la solución, dado que la escala varía drásticamente del resto de componentes.Deje la opción
'MassSingular'en su valor predeterminado'maybe'para probar la detección automática de un DAE.
y0 = [1; 0; 0]; tspan = [0 4*logspace(-6,6)]; M = [1 0 0; 0 1 0; 0 0 0]; options = odeset('Mass',M,'RelTol',1e-4,'AbsTol',[1e-6 1e-10 1e-6]); [t,y] = ode15s(@robertsdae,tspan,y0,options);
Represente la solución.
y(:,2) = 1e4*y(:,2); semilogx(t,y); ylabel('1e4 * y(:,2)'); title('Robertson DAE problem with a Conservation Law, solved by ODE15S');
Argumentos de entrada
Argumentos de salida
Algoritmos
ode15s es un solver de paso variable y orden variable (VSVO) basado en fórmulas de diferenciación numérica (NDF) de órdenes 1 a 5. Opcionalmente, puede usar las fórmulas de diferenciación regresiva (BDF, también conocidas como el método de Gear) que son generalmente menos eficientes. Al igual que ode113, ode15s es un solver de pasos múltiples. Utilice ode15s si ode45 falla o es muy ineficiente y sospecha que el problema es rígido, o cuando resuelva una ecuación diferencial algebraica (DAE) [1], [2].
Referencias
[1] Shampine, L. F. and M. W. Reichelt, “The MATLAB ODE Suite,” SIAM Journal on Scientific Computing, Vol. 18, 1997, pp. 1–22.
[2] Shampine, L. F., M. W. Reichelt, and J.A. Kierzenka, “Solving Index-1 DAEs in MATLAB and Simulink,” SIAM Review, Vol. 41, 1999, pp. 538–552.
Capacidades ampliadas
Historial de versiones
Introducido antes de R2006a