gnssSensor
Simule GNSS para generar lecturas de posición y velocidad.
Descripción
El gnssSensor System object™ simula un sistema global de navegación por satélite (GNSS) para generar lecturas de posición y velocidad basadas en datos locales de posición y velocidad. El objeto calcula las posiciones y velocidades de los satélites basándose en el tiempo del sensor y los datos que especifican los parámetros orbitales del satélite. El objeto utiliza únicamente las constelaciones del Sistema de Posicionamiento Global (GPS) para sus cálculos. Para establecer las posiciones iniciales de los satélites, configure la propiedad InitialTime.
Para generar lecturas de posición y velocidad GNSS:
Cree el objeto
gnssSensory configure sus propiedades.Llame al objeto con argumentos, como si fuera una función.
Para más información sobre el funcionamiento de los System objects, consulte ¿Qué son los System Objects?
Llamar al objeto incrementa el tiempo del sensor y propaga la posición y las velocidades del satélite en función de los parámetros orbitales.
Creación
Descripción
GNSS = gnssSensorgnssSensor System object GNSS que calcula las lecturas del receptor del sistema de navegación por satélite global en función de la posición local y la entrada de velocidad.
GNSS = gnssSensor(ReferenceFrame=RF)
GNSS = gnssSensor(___,Name=Value)gnssSensor("SampleRate",2) crea un GNSS simulado con una frecuencia de muestreo de 2 Hz.
Argumentos de entrada
Propiedades
Uso
Descripción
[ calcula las lecturas del receptor del sistema de navegación por satélite global a partir de las entradas de posición y velocidad.positionReadings,velocityReadings,status] = GNSS(position,velocity)
Argumentos de entrada
Argumentos de salida
Funciones del objeto
Para usar una función de objeto, especifique el System object como el primer argumento de entrada. Por ejemplo, para liberar recursos de sistema de un System object llamado obj, utilice la siguiente sintaxis:
release(obj)
Ejemplos
Genere posiciones y velocidades de destino basadas en la trayectoria de un punto de referencia.
rng(2020) % For repeatable results fs = 0.1; tArrival = 50; tspan = 0:1/fs:tArrival; % Create a waypoint trajectory. trajectory = waypointTrajectory([0,0,0;1,1,1]*500,[0,tArrival]); [positions,~,velocities] = lookupPose(trajectory,tspan)
positions = 6×3
0 0 0
100.0000 100.0000 100.0000
200.0000 200.0000 200.0000
300.0000 300.0000 300.0000
400.0000 400.0000 400.0000
500.0000 500.0000 500.0000
velocities = 6×3
10.0000 10.0000 10.0000
10.0000 10.0000 10.0000
10.0000 10.0000 10.0000
10.0000 10.0000 10.0000
10.0000 10.0000 10.0000
10.0000 10.0000 10.0000
Cree un System object GNSS. Utilice la posición LLA para Natick, MA, como origen del marco de referencia local de la trayectoria.
refLocNatick = [42.2825 -71.343 53.0352]; gnss = gnssSensor('SampleRate',fs, ... 'ReferenceLocation',refLocNatick);
Genere lecturas de posición y velocidad basadas en el objeto GNSS.
[llaReadings,velocityReadings,status] = gnss(positions,velocities)
llaReadings = 6×3
42.2825 -71.3430 53.2973
42.2834 -71.3418 -48.3079
42.2843 -71.3406 -146.2698
42.2852 -71.3394 -247.7892
42.2861 -71.3382 -347.2783
42.2870 -71.3369 -447.2527
velocityReadings = 6×3
9.9907 10.0022 10.0301
10.0090 10.0143 9.9886
9.9946 10.0028 9.9945
9.9783 10.0212 9.9892
10.0079 9.9862 10.0024
10.0186 9.9943 10.0458
status=6×1 struct array with fields:
SatelliteAzimuth
SatelliteElevation
HDOP
VDOP
Cree un modelo de sensor GNSS como gnssSensor System object ™.
gnss = gnssSensor;
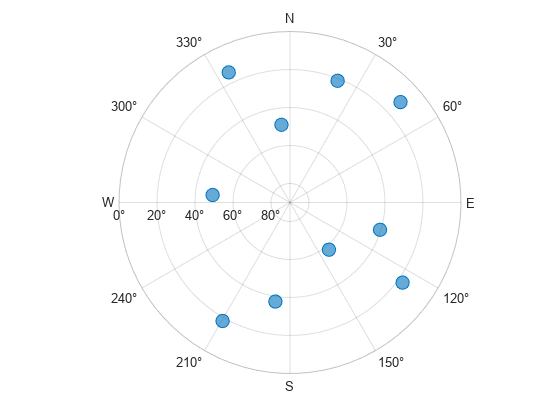
Especifique la posición y la velocidad del sensor. Este ejemplo supone un sensor estacionario en la posición [0 0 0] en el marco de referencia NED. Simule las lecturas del sensor y obtenga el estado de los satélites visibles. Almacene los ángulos de acimut y elevación como vectores.
pos = [0 0 0]; vel = [0 0 0]; [~,~,status] = gnss(pos,vel); satAz = status.SatelliteAzimuth; satEl = status.SatelliteElevation;
Trazar las posiciones de los satélites.
skyplot(satAz,satEl)
Más acerca de
Referencias
[1] Groves, Paul D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems. 2nd ed, Artech House, 2013.
Capacidades ampliadas
Historial de versiones
Introducido en R2020b