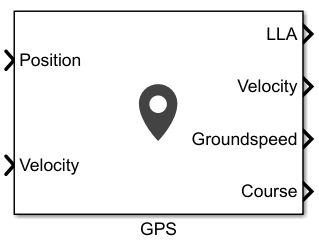
GPS
Bibliotecas:
UAV Toolbox /
UAV Scenario and Sensor Modeling
Navigation Toolbox /
Multisensor Positioning /
Sensor Models
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Sensor Models
Descripción
El bloque genera mediciones GPS afectadas por ruido basadas en la posición de entrada y la velocidad en el sistema de coordenadas local o sistema de coordenadas geodésicas. Utiliza el modelo terrestre WGS84 para convertir coordenadas locales en coordenadas LLA de latitud-longitud-altitud.
Ejemplos
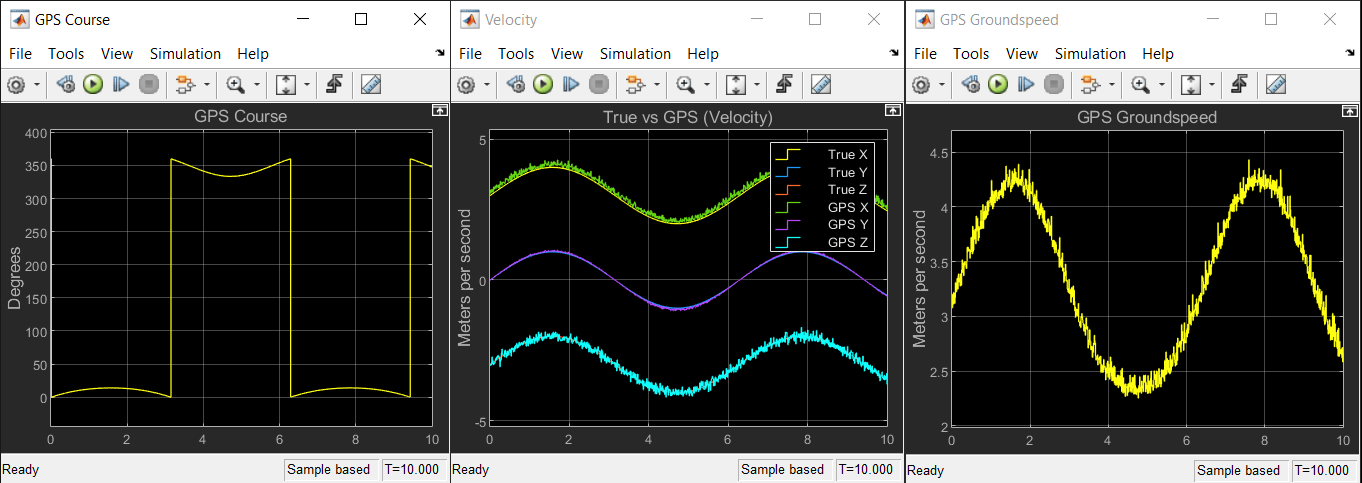
Simular el ruido del sensor GPS
Este ejemplo muestra cómo utilizar el bloque GPS para agregar ruido del sensor GPS a las entradas de posición y velocidad en Simulink®.
Puertos
Entrada
Especifique la posición de entrada del receptor GPS en el sistema de coordenadas de navegación como una matriz real finita de N por 3. N es el número de muestras en el marco actual. El formato de las filas de la matriz difiere según el valor del parámetro Position input format.
Si el valor del parámetro Position input format es
Local, especifique cada fila de Position como coordenadas cartesianas en metros con respecto al sistema de referencia de navegación local, especificado por el parámetro Reference frame, con el origen especificado por el parámetro Reference location.Si el valor del parámetro Position input format es
Geodetic, especifique cada fila de la entrada Position como coordenadas geodésicas de la forma[latitude longitude altitude]. Los valores delatitudeylongitudeestán en grados.Altitudees la altura sobre el modelo elipsoidal WGS84 en metros.
Tipos de datos: single | double
Especifique la velocidad de entrada del receptor GPS en el sistema de coordenadas de navegación en metros por segundo como una matriz real finita de N por 3. N es el número de muestras en el marco actual. El formato de las filas de la matriz difiere según el valor del parámetro Position input format.
Si el valor del parámetro Position input format es
Local, especifique cada fila de Velocity con respecto al sistema de referencia de navegación local (NED o ENU), especificado por el parámetro Reference frame, con el origen especificado por el parámetro Reference location.Si el valor del parámetro Position input format es
Geodetic, especifique cada fila de Velocity con respecto al sistema de referencia de navegación (NED o ENU), especificado por el parámetro Reference frame, con el origen especificado por Position.
Tipos de datos: single | double
Salida
Posición del receptor GPS en el sistema de coordenadas geodésicas de latitud, longitud y altitud (LLA), devuelta como un arreglo real finito de N por 3. La latitud y la longitud están en grados, siendo el norte y el este positivos. La altitud está en metros.
N es el número de muestras en el marco actual.
Tipos de datos: single | double
Velocidad del receptor GPS en el sistema de coordenadas de navegación local en metros por segundo, devuelta como una matriz real finita de N por 3. N es el número de muestras en el marco actual. El formato de las filas de la matriz difiere según el valor del parámetro Position input format.
Si el valor del parámetro Position input format es
Local, la salida Velocity se refiere al sistema de referencia de navegación local (NED o ENU), especificado por el parámetro Reference frame, con el origen especificado por el parámetro Reference location.Si el valor del parámetro Position input format es
Geodetic, la salida Velocity se refiere al sistema de referencia de navegación (NED o ENU), especificado por el parámetro Reference frame, con el origen especificado por LLA.
Tipos de datos: single | double
Magnitud de la velocidad horizontal del receptor GPS en el sistema de coordenadas de navegación local en metros por segundo, devuelta como un vector columna real finito de N elementos.
N es el número de muestras en el marco actual.
Tipos de datos: single | double
Dirección de la velocidad horizontal del receptor GPS en el sistema de coordenadas de navegación local, en grados, devuelta como un vector columna real finito de N elementos con valores de 0 a 360. El Norte corresponde a 0 grados y el Este corresponde a 90 grados.
N es el número de muestras en el marco actual.
Tipos de datos: single | double
Parámetros
Especifique el sistema de referencia como NED (Norte-Este-Abajo) o ENU (Este-Norte-Arriba).
Especifique el formato de entrada de coordenadas de posición como Local o Geodetic.
Si se establece este parámetro en
Local, la entrada al puerto Position debe estar en forma de coordenadas cartesianas con respecto al sistema de coordenadas de navegación local, especificado por el parámetro Reference Frame, con el origen fijo y definido por el parámetro Reference location. La entrada al puerto de entrada Velocity también debe tener en cuenta este sistema de coordenadas de navegación local.Si establece este parámetro en
Geodetic, entonces la entrada al puerto Position debe ser coordenadas geodésicas en[latitude longitude altitude]. La entrada al puerto de entrada Velocity también debe ser con respecto al sistema de coordenadas de navegación especificado por el parámetro Reference frame, con el origen correspondiente al puerto Position.
Especifique el origen del sistema de referencia local como un vector fila de tres elementos en coordenadas geodésicas [latitude longitude altitude], donde altitude es la altura sobre el modelo de elipsoide de referencia WGS84. Los valores de ubicación de referencia están en grados, grados y metros, respectivamente. El formato de grado es grados decimales (DD).
Dependencias
Para habilitar este parámetro, establezca el parámetro Position input format en Local.
Especifique la precisión de la posición horizontal como un escalar real no negativo en metros. La precisión de la posición horizontal especifica la desviación estándar del ruido en la medición de la posición horizontal. Aumentar este valor añade ruido a la medición, disminuyendo su precisión.
Ajustable: Yes
Especifique la precisión de la posición vertical como un escalar real no negativo en metros. La precisión de la posición vertical especifica la desviación estándar del ruido en la medición de la posición vertical. Aumentar este valor añade ruido a la medición, disminuyendo su precisión.
Ajustable: Yes
Especifique la precisión de la velocidad por segundo como un escalar real no negativo en metros. La precisión de la velocidad especifica la desviación estándar del ruido en la medición de la velocidad. Aumentar este valor añade ruido a la medición, disminuyendo su precisión.
Ajustable: Yes
Especifique el factor de caída del ruido de posición global como un escalar numérico en el rango [0, 1]. Un factor de decaimiento de 0 modela el ruido de posición global como un proceso de ruido blanco. Un factor de caída de 1 modela el ruido de posición global como un proceso de recorrido aleatorio.
Ajustable: Yes
Especifique el valor inicial de un algoritmo generador de números aleatorios mt19937ar como un entero no negativo.
Seleccione el tipo de simulación a ejecutar entre estas opciones:
Interpreted execution: Simule el modelo utilizando el intérprete de MATLAB®. Para obtener más información, consulte Interpreted Execution vs. Code Generation.Code generation: Simule el modelo utilizando el código generado en C. La primera vez que ejecuta una simulación, Simulink® genera código C para el bloque. El código C se reutiliza en simulaciones posteriores, siempre que el modelo no cambie.
Capacidades ampliadas
Generación de código C/C++
Genere código C y C++ mediante Simulink® Coder™.
Historial de versiones
Introducido en R2021b
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Seleccione un país/idioma
Seleccione un país/idioma para obtener contenido traducido, si está disponible, y ver eventos y ofertas de productos y servicios locales. Según su ubicación geográfica, recomendamos que seleccione: .
También puede seleccionar uno de estos países/idiomas:
Cómo obtener el mejor rendimiento
Seleccione China (en idioma chino o inglés) para obtener el mejor rendimiento. Los sitios web de otros países no están optimizados para ser accedidos desde su ubicación geográfica.
América
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)