append
Agregar estados al final de la ruta
Sintaxis
Descripción
Ejemplos
Crea un objeto navPath basado en múltiples puntos de referencia en un espacio de Dubins.
dubinsSpace = stateSpaceDubins([0 25; 0 25; -pi pi])
dubinsSpace =
stateSpaceDubins with properties:
SE2 Properties
Name: 'SE2 Dubins'
StateBounds: [3×2 double]
NumStateVariables: 3
Dubins Vehicle Properties
MinTurningRadius: 1
pathobj = navPath(dubinsSpace)
pathobj =
navPath with properties:
StateSpace: [1×1 stateSpaceDubins]
States: [0×3 double]
NumStates: 0
MaxNumStates: Inf
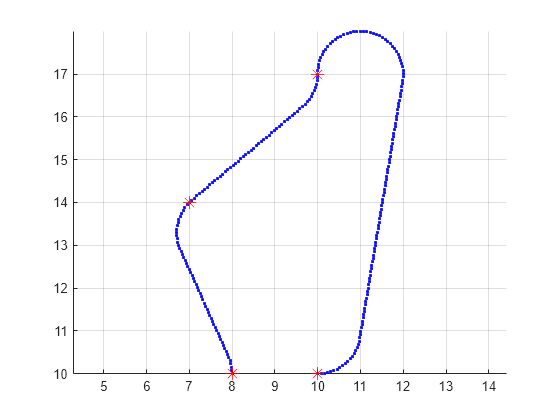
waypoints = [8 10 pi/2;
7 14 pi/4;
10 17 pi/2;
10 10 -pi];
append(pathobj,waypoints)Interpola esa ruta para que contenga exactamente 250 puntos.
interpolate(pathobj,250)
Visualice la ruta interpolada y los puntos de referencia originales.
figure grid on axis equal hold on plot(pathobj.States(:,1),pathobj.States(:,2),".b") plot(waypoints(:,1),waypoints(:,2),"*r","MarkerSize",10)
Calcular la longitud de la ruta.
len = pathLength(pathobj);
disp("Path length = " + num2str(len))Path length = 19.4722
Cargue un mapa de ocupación tridimensional de una manzana de la ciudad en el espacio de trabajo. Especifique el umbral para considerar las celdas libres de obstáculos.
mapData = load("dMapCityBlock.mat");
omap = mapData.omap;
omap.FreeThreshold = 0.5;Infle el mapa de ocupación para agregar una zona de amortiguamiento para una operación segura alrededor de los obstáculos.
inflate(omap,1)
Cree un objeto de espacio de estados SE(3) con límites para las variables de estado.
ss = stateSpaceSE3([0 220;0 220;0 100;inf inf;inf inf;inf inf;inf inf]);
Crea un objeto navPath basado en múltiples puntos de referencia en un espacio de estados SE(3).
path = navPath(ss);
waypoints = [40 180 15 0.7 0.2 0 0.1;
55 120 20 0.6 0.2 0 0.1;
100 100 25 0.5 0.2 0 0.1;
130 90 30 0.4 0 0.1 0.6;
150 33 35 0.3 0 0.1 0.6];
append(path,waypoints)Interpola esa ruta para que contenga exactamente 250 puntos.
interpolate(path,250)
Visualice la ruta interpolada y los puntos de referencia originales.
show(omap) axis equal view([-10 55]) hold on % Start state scatter3(waypoints(1,1),waypoints(1,2),waypoints(1,3),"g","filled") % Goal state scatter3(waypoints(end,1),waypoints(end,2),waypoints(end,3),"r","filled") % Intermediate waypoints scatter3(waypoints(2:end-1,1),waypoints(2:end-1,2), ... waypoints(2:end-1,3),"y","filled") % Path plot3(path.States(:,1),path.States(:,2),path.States(:,3), ... "r-",LineWidth=2)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains 5 objects of type patch, scatter, line.](createnavpathbasedonmultiplewaypointsinse3statespaceexample_01_es.png)
Calcular la longitud de la ruta.
len = pathLength(path);
disp("Path length = " + num2str(len))Path length = 204.1797
Argumentos de entrada
Capacidades ampliadas
Historial de versiones
Introducido en R2019b