isStateValid
Comprobar si el estado es válido
Descripción
Ejemplos
Este ejemplo muestra cómo validar rutas a través de un entorno.
Cargar mapas de ejemplo. Utilice el mapa simple para crear un mapa de ocupación binario.
load exampleMaps.mat
map = occupancyMap(simpleMap);
show(map)![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](validatepaththroughoccupancymapenvironmentexample_01_es.png)
Especifique una ruta aproximada a través del mapa.
path = [2 2 pi/2; 10 15 0; 17 8 -pi/2]; hold on plot(path(:,1),path(:,2),"--o")
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 2 objects of type image, line.](validatepaththroughoccupancymapenvironmentexample_02_es.png)
Cree un validador de estado utilizando la definición stateSpaceSE2. Especifique el mapa y la distancia para interpolar y validar segmentos de ruta.
validator = validatorOccupancyMap(stateSpaceSE2); validator.Map = map; validator.ValidationDistance = 0.1;
Compruebe que los puntos de la ruta sean estados válidos. Los tres puntos están en el espacio libre, por lo que se consideran válidos.
isValid = isStateValid(validator,path)
isValid = 3×1 logical array
1
1
1
Verifique el movimiento entre cada estado de ruta secuencial. La función isMotionValid interpola a lo largo de la ruta entre estados. Si un segmento de ruta no es válido, trace el último punto válido a lo largo de la ruta.
startStates = [path(1,:);path(2,:)];
endStates = [path(2,:);path(3,:)];
for i = 1:2
[isPathValid, lastValid] = isMotionValid(validator,startStates(i,:),endStates(i,:));
if ~isPathValid
plot(lastValid(1),lastValid(2),'or')
end
end
hold off![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 3 objects of type image, line. One or more of the lines displays its values using only markers](validatepaththroughoccupancymapenvironmentexample_03_es.png)
Este ejemplo muestra cómo validar rutas a través de un entorno.
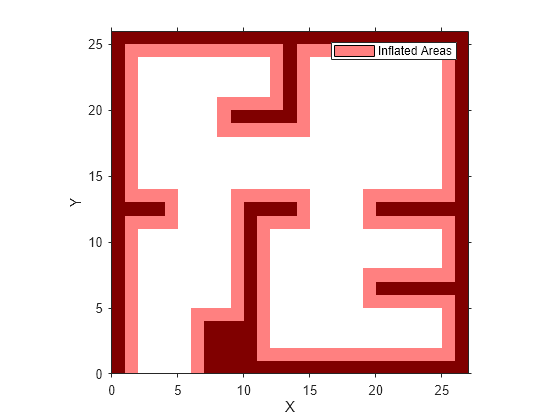
Cargar mapas de ejemplo. Utilice el mapa simple para crear un mapa de costes de vehículos. Especifique un radio de inflación de 1 metro.
load exampleMaps.mat map = vehicleCostmap(double(simpleMap)); map.CollisionChecker = inflationCollisionChecker("InflationRadius",1); plot(map)
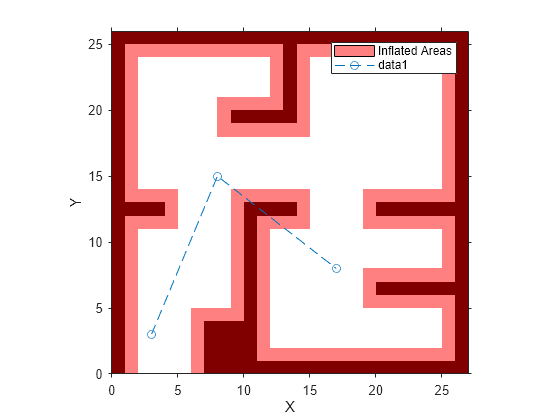
Especifique una ruta aproximada a través del mapa.
path = [3 3 pi/2; 8 15 0; 17 8 -pi/2]; hold on plot(path(:,1),path(:,2),"--o")
Cree un validador de estado utilizando la definición stateSpaceSE2. Especifique el mapa y la distancia para interpolar y validar segmentos de ruta.
validator = validatorVehicleCostmap(stateSpaceSE2); validator.Map = map; validator.ValidationDistance = 0.1;
Compruebe que los puntos de la ruta sean estados válidos. Los tres puntos están en el espacio libre, por lo que se consideran válidos.
isValid = isStateValid(validator,path)
isValid = 3×1 logical array
1
1
1
Verifique el movimiento entre cada estado de ruta secuencial. La función isMotionValid interpola a lo largo de la ruta entre estados. Si un segmento de ruta no es válido, trace el último punto válido a lo largo de la ruta.
startStates = [path(1,:);path(2,:)];
endStates = [path(2,:);path(3,:)];
for i = 1:2
[isPathValid, lastValid] = isMotionValid(validator,startStates(i,:),endStates(i,:));
if ~isPathValid
plot(lastValid(1),lastValid(2),'or')
end
end
hold off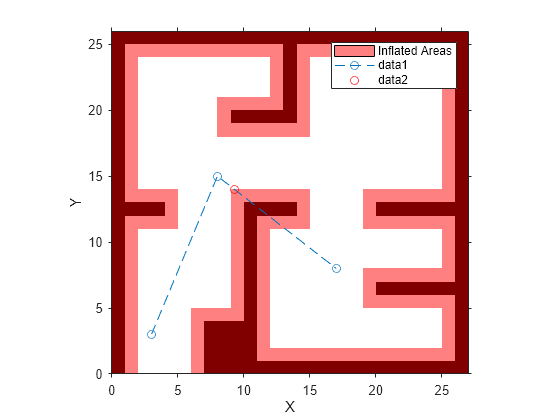
Cree un mapa de ocupación tridimensional y un validador de estado asociado. Planifique, valide y visualice una ruta a través del mapa de ocupación.
Cargar y asignar mapa al validador de estado
Cargue un mapa de ocupación tridimensional de una manzana de la ciudad en el espacio de trabajo. Especifique un umbral para qué celdas se considerarán libres de obstáculos.
mapData = load('dMapCityBlock.mat');
omap = mapData.omap;
omap.FreeThreshold = 0.5;Infle el mapa de ocupación para agregar una zona de amortiguamiento para una operación segura alrededor de los obstáculos.
inflate(omap,1)
Cree un objeto de espacio de estados SE(3) con límites para las variables de estado.
ss = stateSpaceSE3([-20 220;
-20 220;
-10 100;
inf inf;
inf inf;
inf inf;
inf inf]);Cree un validador de estado de mapa de ocupación 3D utilizando el espacio de estado creado.
sv = validatorOccupancyMap3D(ss);
Asigne el mapa de ocupación al objeto validador de estado. Especifique el intervalo de distancia de muestreo.
sv.Map = omap; sv.ValidationDistance = 0.1;
Planificar y visualizar la ruta
Cree un planificador de rutas con una distancia máxima de conexión aumentada. Reducir el número máximo de iteraciones.
planner = plannerRRT(ss,sv); planner.MaxConnectionDistance = 50; planner.MaxIterations = 1000;
Cree una función de evaluación definida por el usuario para determinar si la ruta alcanza la meta. Especifique la probabilidad de elegir el estado objetivo durante el muestreo.
planner.GoalReachedFcn = @(~,x,y)(norm(x(1:3)-y(1:3))<5); planner.GoalBias = 0.1;
Establezca los estados de inicio y objetivo.
start = [40 180 25 0.7 0.2 0 0.1]; goal = [150 33 35 0.3 0 0.1 0.6];
Planifique una ruta utilizando el inicio, el objetivo y el planificador especificados.
[pthObj,solnInfo] = plan(planner,start,goal);
Compruebe que los puntos de la ruta sean estados válidos.
isValid = isStateValid(sv,pthObj.States)
isValid = 7×1 logical array
1
1
1
1
1
1
1
Compruebe que el movimiento entre cada estado de ruta secuencial sea válido.
isPathValid = zeros(size(pthObj.States,1)-1,1,'logical'); for i = 1:size(pthObj.States,1)-1 [isPathValid(i),~] = isMotionValid(sv,pthObj.States(i,:),... pthObj.States(i+1,:)); end isPathValid
isPathValid = 6×1 logical array
1
1
1
1
1
1
Visualiza los resultados.
show(omap) hold on scatter3(start(1,1),start(1,2),start(1,3),'g','filled') % draw start state scatter3(goal(1,1),goal(1,2),goal(1,3),'r','filled') % draw goal state plot3(pthObj.States(:,1),pthObj.States(:,2),pthObj.States(:,3),... 'r-','LineWidth',2) % draw path
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains 4 objects of type patch, scatter, line.](validatepaththrough3doccupancymapenvironmentexample_01_es.png)
Argumentos de entrada
Argumentos de salida
Historial de versiones
Introducido en R2019b
Consulte también
isMotionValid | stateSpaceSE2 | nav.StateSpace | nav.StateValidator