validatorVehicleCostmap
Validador de estado basado en mapa de costes 2-D
Descripción
El objeto validatorOccupancyMap valida estados y movimientos discretizados según el valor en un mapa de costos 2-D. validatorVehicleCostmap interpreta un área de mapa ocupada o desconocida como un estado no válido. Un área de mapa libre se interpreta como válida.
Creación
Sintaxis
Descripción
validator = validatorVehicleCostmap
validator = validatorVehicleCostmap(stateSpace)nav.StateSpace.
validator = validatorVehicleCostmap(stateSpace,Name,Value)Map o XYIndices utilizando el par de argumentos Name,Value.
Propiedades
Funciones del objeto
copy | Crear una copia profunda del objeto del validador de estado |
isStateValid | Comprobar si el estado es válido |
isMotionValid | Comprobar si la ruta entre estados es válida |
Ejemplos
Este ejemplo muestra cómo validar rutas a través de un entorno.
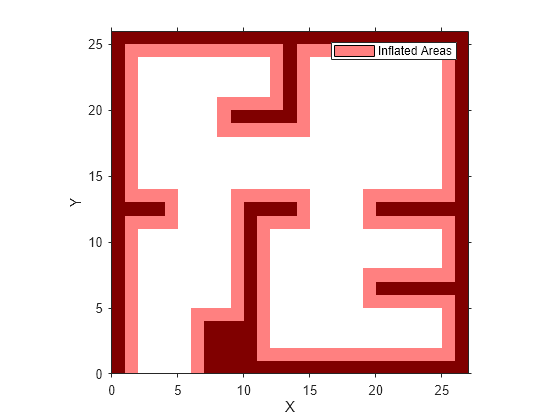
Cargar mapas de ejemplo. Utilice el mapa simple para crear un mapa de costes de vehículos. Especifique un radio de inflación de 1 metro.
load exampleMaps.mat map = vehicleCostmap(double(simpleMap)); map.CollisionChecker = inflationCollisionChecker("InflationRadius",1); plot(map)
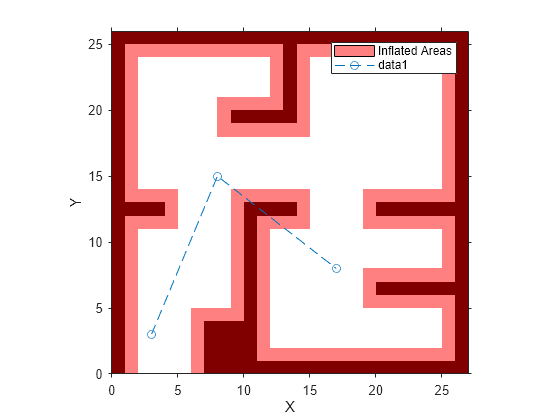
Especifique una ruta aproximada a través del mapa.
path = [3 3 pi/2; 8 15 0; 17 8 -pi/2]; hold on plot(path(:,1),path(:,2),"--o")
Cree un validador de estado utilizando la definición stateSpaceSE2. Especifique el mapa y la distancia para interpolar y validar segmentos de ruta.
validator = validatorVehicleCostmap(stateSpaceSE2); validator.Map = map; validator.ValidationDistance = 0.1;
Compruebe que los puntos de la ruta sean estados válidos. Los tres puntos están en el espacio libre, por lo que se consideran válidos.
isValid = isStateValid(validator,path)
isValid = 3×1 logical array
1
1
1
Verifique el movimiento entre cada estado de ruta secuencial. La función isMotionValid interpola a lo largo de la ruta entre estados. Si un segmento de ruta no es válido, trace el último punto válido a lo largo de la ruta.
startStates = [path(1,:);path(2,:)];
endStates = [path(2,:);path(3,:)];
for i = 1:2
[isPathValid, lastValid] = isMotionValid(validator,startStates(i,:),endStates(i,:));
if ~isPathValid
plot(lastValid(1),lastValid(2),'or')
end
end
hold off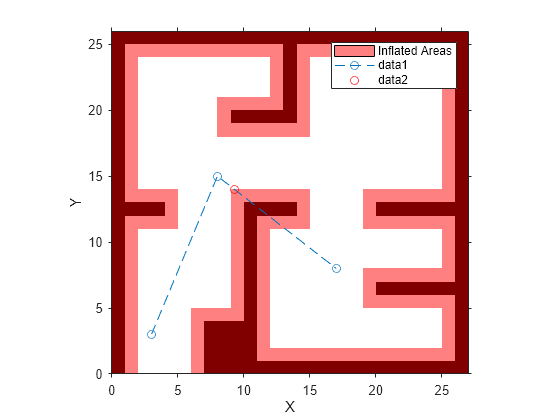
Capacidades ampliadas
Historial de versiones
Introducido en R2019b
Consulte también
validatorOccupancyMap | stateSpaceSE2 | nav.StateSpace | nav.StateValidator