Simulating Site-Specific Bistatic Land Clutter
This example shows how to generate bistatic clutter for waveform-level, or in-phase and quadrature (I/Q) level, simulation and processing. You will set up a bistatic radar scenario, model a land surface with elevation data, analyze the received clutter at the power level, and generate and process I/Q signals. Bistatic clutter is especially challenging to model given the wide variety of geometries and phenomenology associated with out-of-plane scattering from land and sea [1]. You will use the bistaticSurfaceReflectivityLand feature to leverage a clutter model validated against collected data [2]. Another challenge with bistatic radar clutter simulation is computational complexity. This workflow will show you how to minimize time lost on intensive simulation by first building intuition at the power-level, ensuring your simulation is set up correctly and accurately. You will also optimize the high fidelity I/Q simulation over thousands of clutter patches using parallel processing.
Define Bistatic Scenario
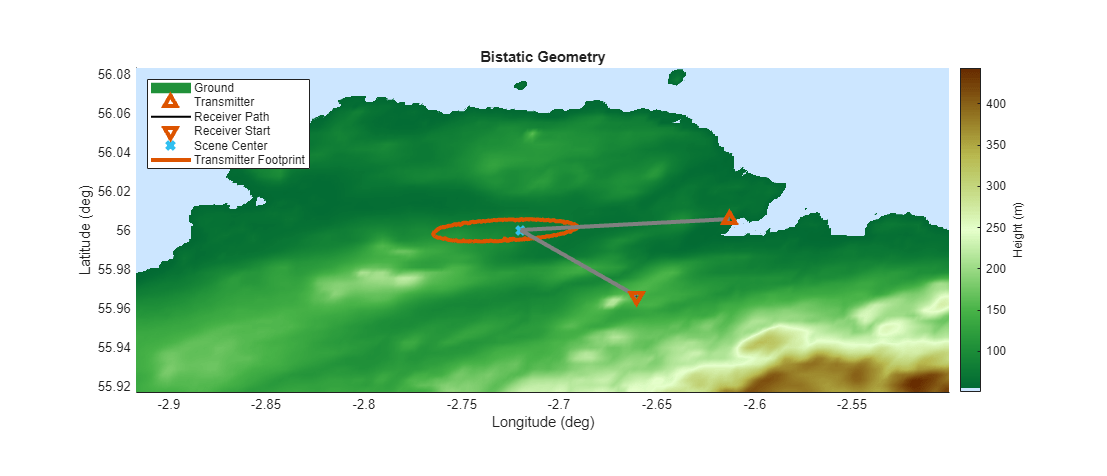
This bistatic scenario consists of an X-band bistatic transmitter and a bistatic receiver on separate airborne platforms. The radar sensors are steered to illuminate the terrain, aimed at the central aim point as seen in the annotated overview figure below.
Terrain and Reflectivity
The scenario is set in East Fortune, Scotland. Define an earth-centered scene using radarScenario. Use wmsfind (Mapping Toolbox) and wmsread (Mapping Toolbox) to load in digital elevation map data to model the terrain for the land surface. The elevation map contains orthometric heights referenced to the EGM96 geoid. Use egm96geoid to convert these heights to ellipsoidal heights referenced to the WGS84 ellipsoid. Input the elevation data to a landSurface object.
clear; rng(0); scene = radarScenario(IsEarthCentered=true,UpdateRate=0); % Load digital elevation map to model terrain layers = wmsfind("mathworks","SearchField","serverurl"); elevation = refine(layers,"elevation"); [A,R] = wmsread(elevation,Latlim=[55.91667 56.08333],Lonlim=[-2.91722 -2.5], ... ImageFormat="image/bil"); % Reference heights to the WGS84 ellipsoid N = egm96geoid(R); Z = double(A) + N; bdry = [R.LatitudeLimits; R.LongitudeLimits]; % latitude and longitude limits (deg) srf = landSurface(scene,Terrain=flipud(Z).',Boundary=bdry);
The ReflectionCoefficient property of the landSurface is a default. In this example, you will be computing surface reflection coefficients using the bistaticSurfaceReflectivityLand feature and inserting the coefficients into in the scenario simulation loop. This feature provides an X-band bistatic clutter reflectivity model which assumes a rural land type. This model is based on [2] which produces clutter reflections that closely matches the clutter shape and relative power levels (in an RDM) of clutter from real-world data collection in this location. Users can input a custom model into this feature for greater flexibility.
Create a bistaticSurfaceReflectivityLand object with the default settings. You will use this object later in the example to generate bistatic normalized radar cross section values for each scattering geometry.
biRefl = bistaticSurfaceReflectivityLand(InPlaneModel='Domville',... InPlaneLandType="Rural",OutOfPlaneModel="RuralInterpolation");
Platform Trajectories
Set the latitude, longitude and altitude values of the center of the scene on the ground to aim the transmit and receive beams. Compute the average surface height above the WGS84 ellipsoid from the elevation data. Use this to inform the altitude values of the platforms holding the transmitter and receiver. Set the initial positions of the transmitter and receiver in Latitude (degrees), Longitude (degrees) and altitude (m). These values have been pre-computed; use the helperVerifyRxRngAngle helper function to compute the distance to the scene center and bistatic angle between the transmitter, receiver, and scene center betaAim.
aimPos = [56 -2.72 100]; % Latitude (degrees), Longitude (degrees), Altitude (m)
meanSurfHgt = mean(Z(:));
txRxHgtRelSurface = 1000;
altTxRx = txRxHgtRelSurface + meanSurfHgt;
txPos = [56.0056 -2.6127 altTxRx];
rxPos = [55.9661 -2.6603 altTxRx];
[rxRng, betaAim] = helperVerifyRxRngAngle(txPos,rxPos,aimPos)rxRng = 5.3994e+03
betaAim = 49.9938
Note the distance from the receiver to the scene center is roughly 5.4 km and the bistatic angle is approximately 50 degrees. Set the trajectories of the platforms. Set a receiver velocity of [-20 -38 0]. The velocity vector is in east-north-up (ENU) coordinates in units of m/s. Convert this vector to latitude, longitude, and altitude centered on rxPos, to produce the waypoint rxPos2, which is the location of the platform 1 second in the future. Next create a trajectory with the waypoints and arrival times of the platform. Finally, add the receiver platform to the scene. The transmitter in [2] was on a helicopter attempting to remain stationary, so for consistency set up a non-moving trajectory for the transmitter by duplicating the same position as the two waypoints.
rxVel = [-20 -38 0]; % east (m/s), north (m/s), up (m/s) rxPos2 = enu2lla(rxVel,rxPos,'ellipsoid'); rxTraj = geoTrajectory(Waypoints=[rxPos; rxPos2],TimeOfArrival=[0 1],ReferenceFrame="ENU"); rxPlat = platform(scene,Trajectory=rxTraj); txTraj = geoTrajectory(Waypoints=[txPos; txPos],TimeOfArrival=[0 1],ReferenceFrame="ENU"); txPlat = platform(scene,Trajectory=txTraj);
Finally, set the mounting angles of the transmitter and receiver antennas on their respective platforms.
txMntAng = [-175 9.0 0]; rxMntAng = [-110 11.5 0];
Waveform Parameters and Simulation Time
Set the bandwidth to 1.5 MHz. Higher values for bandwidth result in finer clutter resolution, increasing the number of clutter patches and extending simulation time. Set the sample rate for the I/Q simulation equal to the bandwidth and refine the pulse repetition frequency (PRF) so that each pulse repetition interval (PRI) is an integer number of samples. Set the pulse width, rounded to the nearest sample. Finally, create the bistatic radar waveform using the phased.LinearFMWaveform object.
BW = 1.5e6; % Hz Fs = BW; % Hz prfDesired = 3.5e3; % Hz prf = 1/(round(1/prfDesired*Fs))*Fs; % Hz pw = round(2.86e-6*Fs)/Fs; % s wav = phased.LinearFMWaveform(PRF=prf,SweepBandwidth=BW,SampleRate=Fs,PulseWidth=pw);
Define the coherent processing interval (CPI). Set the number of pulses in a CPI and set the number of pulses in the simulation to be exactly 1 CPI.
numPulsesCPI = 128;
numPulsesSim = 1*numPulsesCPI;
simTime = numPulsesSim.*1/prf; % secondsAntenna Parameters
Define the transmitter and receiver properties. Use the phased.SincAntennaElement and define the desired beamwidth in degrees for azimuth and elevation. Make the receiver isotropic to enable receiving the direct path as well as clutter, which arrive from very different angles. This clutter generation methodology will work for other antenna choices. If you desire to see the effects of the direct path, you may need to ensure your antenna has some gain in that direction, which for some geometries could be in the back hemisphere of the antenna pattern, .
freq = 9.4e9; lambda = freq2wavelen(freq); % Wavelength (m) AntBeamwidth = [10 6]; % Azimuth (deg), Elevation (deg) arrayTx = phased.SincAntennaElement(Beamwidth=AntBeamwidth); arrayRx = phased.IsotropicAntennaElement;
Define transmitter gain in dBi and peak power in W. Create a phased.Transmitter object, a phased.Radiator object, and finally instantiate a bistaticTransmitter that brings together the complete specification of the transmit system.
tx = phased.Transmitter(PeakPower=1e3,Gain=0);
biTxAnt = phased.Radiator(Sensor=arrayTx,OperatingFrequency=freq,SensorGainMeasure='dBi');
biTx = bistaticTransmitter(TransmitAntenna=biTxAnt,Transmitter=tx,Waveform=wav);Now specify the receiver by building a phased.Receiver, phased.Collector, define the maximum collect duration (MaxCollectDuration), and instantiate a bistaticReceiver.
rx = phased.Receiver(SampleRate=Fs,Gain=0); biRxAnt = phased.Collector(Sensor=arrayRx, OperatingFrequency=freq,SensorGainMeasure='dBi'); maxCollectDur = round((numPulsesSim+4)/prf*Fs)*1/Fs; % Must be an integer number of samples biRx = bistaticReceiver(ReceiveAntenna=biRxAnt,Receiver=rx, ... WindowDuration=simTime,SampleRate=Fs, ... MaxCollectDurationSource="Property",MaxCollectDuration=maxCollectDur);
Configure Clutter Generation
Although ClutterGenerator and radarTransceiver are typically used for monostatic simulation, you can leverage them here to define clutter patches on key regions of the terrain and exclude clutter with no line-of-sight to both the transmitter and receiver. First, build radarTransceiver objects to configure the clutterGenerators with the mounting angles and antenna patterns of the bistatic transmitter and receiver, and add them to the platforms in the scenario.
clutterConfigTx = radarTransceiver(Waveform=wav, Transmitter=tx, Receiver=rx, ... TransmitAntenna=phased.Radiator(Sensor=arrayTx, OperatingFrequency=freq),... ReceiveAntenna=phased.Collector(Sensor=arrayTx, OperatingFrequency=freq),... MountingAngles=txMntAng); clutterConfigRx = radarTransceiver(Waveform=wav, Transmitter=tx, Receiver=rx, ... TransmitAntenna=phased.Radiator(Sensor=arrayRx, OperatingFrequency=freq), ... ReceiveAntenna=phased.Collector(Sensor=arrayRx, OperatingFrequency=freq),... MountingAngles=rxMntAng); % Add the TX and RX clutter objects to the transmit and receive platforms txPlat.Sensors = clutterConfigTx; rxPlat.Sensors = clutterConfigRx;
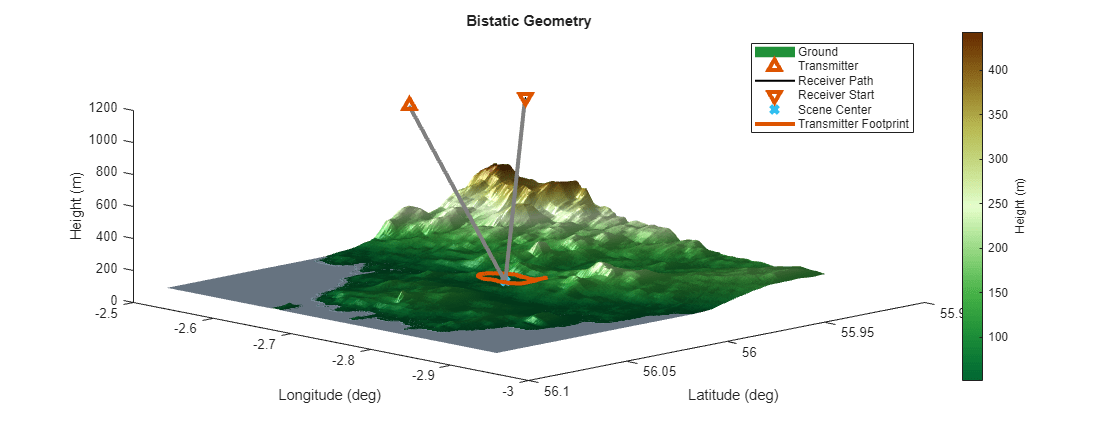
This is all you need to start to explore your scenario visually. Execute the provided helperPlots script, which allows you to access the functions designed for visualizing the data in this example. Explore the scene from the top down and in 3D, noting that the radar transmitter beam footprint covers the scene center.
viz = helperPlots; viz.TopDown(Z,R,aimPos,txPlat,rxPlat);
viz.ThreeDim(Z,R,aimPos,txPlat,rxPlat)
There are two configurations for this example, which control the number of clutter patches:
Main Beam Only (default) - Simulate just the strongest clutter returns from the main beam footprint of the transmitter (set
ClutterRegionSizeto"Main Beam Only"). This results in a few thousand clutter patches. The example is pre-configured with this option to make the simulation more straightforward and faster to execute.Large Sector - Simulate more complete clutter picture with transmit sidelobes (set
ClutterRegionSizeto "Large Sector) for tens of thousands of patches.
For reference, key results from both ClutterRegionSize selections are provided as images here. The example is pre-configured for the left side.
Create a clutterGenerator for the transmitter. If ClutterRegionSize is set to "Main Beam Only," setting UseBeam=true will immediately create a clutter region tied to the 3 dB beamwidth footprint of the transmit beam on the ground. If ClutterRegionSize is set to "Large Sector," instead add an azimuth sector of clutter with ringClutterRegion. Finally, add a receiver clutterGenerator object with a wide azimuth sector, that includes the region laid out with the transmitter clutterGenerator. This will be used later when clutter patches are generated to ensure all patches have line of sight to both the transmitter and receiver.
ClutterRegionSize ="Main Beam Only"; clutterRes = bw2rangeres(BW); rngLim = 15e3; switch ClutterRegionSize case 'Main Beam Only' clutgenTx = clutterGenerator(scene,clutterConfigTx,RangeLimit=rngLim,Resolution=clutterRes,UseBeam=true); case 'Large Sector' clutgenTx = clutterGenerator(scene,clutterConfigTx,RangeLimit=rngLim,Resolution=clutterRes,UseBeam=false); ringClutterRegion(clutgenTx,0,rngLim,90,-115); otherwise clutgenTx = clutterGenerator(scene,clutterConfigTx,RangeLimit=rngLim,Resolution=clutterRes,UseBeam=true); end clutgenRx = clutterGenerator(scene,clutterConfigRx,RangeLimit=30e3,Resolution=clutterRes,UseBeam=false); ringClutterRegion(clutgenRx,0,30e3,360,0);
You have created all the necessary objects for your bistatic scenario with site-specific clutter.
Power Level Reflectivity Analysis
Before simulation and processing of I/Q level data it is valuable to first perform faster computations to analyze the power-level metrics, geometry attributes, and predict the location of clutter in range and Doppler space.
First group the clutter patches into batches for faster processing. Next iterate over the clutter patches in the scenario to determine the bistatic reflectivity and save off useful data products from bistaticFreeSpacePath and the sensor properties. In the final sub-section, plot and investigate the stored power level values, such as two-way gains, bistatic range, bistatic Doppler, and angle to the receiver.
To get started, advance the scene and advance the clutterGenerators. Create the clutter patches given the geometry of the platforms under these initial conditions. You will see:
cposes: stores the position for each local clutter patchcAreas: stores the area of each clutter patch in square meterscNormals: stores the surface normal unit vector at each clutter patch
advance(scene); time = scene.SimulationTime; helperAdvanceClutterGenerator(clutterConfigTx,clutterConfigRx,time); [cposes, cAreas, cNormals] = helperGetClutterPatches(clutgenTx,clutgenRx,srf);
Batch the Clutter to Optimize Parallel Processing
Given the large number of clutter patches when ClutterRegionSize is set to "Large Sector", this example leverages parallel processing even for power level analysis. When ClutterRegionSize is set to "Main Beam Only," you may not see discernible computation speed ups. Set numPatchesPerBatch. You may need to tune this to optimize run-time for your system. Use the provided helper function helperBatchIdx to slice the potentially large clutter arrays to avoid additional overhead when parallel processing. Additionally, clone the system objects to be used in the simulation, namely the bistatic transmitter, the bistatic receiver, and the bistaticSurfaceReflectivityLand object. To learn more about using objects in parfor-loops, see Use Objects and Handles in parfor-Loops (Parallel Computing Toolbox).
numPatchesPerBatch = 200; numPatches = numel(cposes)
numPatches = 1221
% Create index sets for parallel processing
[idxBatch,cposesCell,cAreasCell,cNormalsCell] = helperBatchIdx(numPatchesPerBatch,numPatches,cposes,cAreas,cNormals);
numBatches = numel(idxBatch)numBatches = 7
biTxVec = arrayfun(@(x) clone(biTx),1:numBatches,UniformOutput=false); biRxVec = arrayfun(@(x) clone(biRx),1:numBatches,UniformOutput=false); biReflVec = arrayfun(@(x) clone(biRefl),1:numBatches,UniformOutput=false);
With this framework you are now poised to determine and analyze reflectivity at the power level, including normalized power levels and locations in bistatic range and Doppler space.
Compute Reflectivity, Gain, and Propagation Information
Extract precise location, size, and orientation information about the individual clutter cells and platforms at the start of the CPI. Once you have determined the total number of patches at the outset (there will be thousands), use the helper function provided to deal the indices of the clutter to different batches for parallel processing. Preallocate outputs to store the reflection coefficients that will be computed from the normalized bistatic RCS and measurement level metrics for analysis.
refCoeff = cell(1,numBatches); PowerAnalysisTerms = cell(1,numBatches); % Estimate the range and Doppler bin size dr = physconst('lightspeed')/Fs; df = prf/numPulsesCPI; poses = platformPoses(scene,"rotmat"); rxPose = poses(1); txPose = poses(2); txPosECEF = txPose.Position.'; rxPosECEF = rxPose.Position.';
For each batch of clutter, compute the bistaticFreeSpacePath given the transmitter, receiver, and clutter positions. The output proppaths struct contains path length, path loss, reflection coefficient, angle of departure, angle of arrival, and doppler shift fields. You need to replace this reflection coefficient with the bistatic RCS as determined by the bistatic clutter model in bistaticSurfaceReflectivityLand.
Determine the incident grazing angle on that clutter path, scattering grazing angle, and angle out-of-the plane defined between the transmitter and each clutter patch.
Compute the normalized bistatic RCS using the
bistaticSurfaceReflectivityLandobject and these angles.Compute the total RCS given each clutter patch area
Convert RCS to reflection coefficient using the target gain factor equation from
phased.RadarTargetAdd variability consistent with noise-like clutter scattering properties
Store the values for I/Q simulation in the next section
Finally extract and store measurement level information for later analysis.
parfor ii = 1:numBatches idx = idxBatch{ii}; proppaths = bistaticFreeSpacePath(freq, ... txPose,rxPose,... cposesCell{ii},... IncludeDirectPath=false, ... ReceiverMountingAngles=rxMntAng,TransmitterMountingAngles=txMntAng); surfaceNormal = cNormalsCell{ii}.'; surfacePos = vertcat(cposesCell{ii}.Position); % 1. Determine the incident grazing angle, scattering grazing angle, and angle out-of-the plane [angIn, angScat, angAz] = helperComputeSurfaceAngles(txPosECEF, rxPosECEF, surfacePos, surfaceNormal); % 2. Compute the normalized bistatic RCS bR = biReflVec{ii}; nrcs = bR(angIn(:),angScat(:),angAz(:),freq).'; % 3. Compute the total RCS given patch Area rcs = nrcs.*cAreasCell{ii}; % 4. Convert RCS to reflection coefficient refCoeffExp = sqrt(4*pi./lambda^2*rcs); % % 5. Add variability consistent with noise-like clutter scattering properties sz = size(refCoeffExp); rayleighAmpFactor = abs(complex(randn(sz),randn(sz))) / sqrt(pi/2); % Create Rayleigh random variable from Gaussian psi = exp(1i*2*pi*rand(sz)); % Uniform distributed phase % 6. Store values refCoeff{ii} = refCoeffExp.*rayleighAmpFactor.*psi; % Extract and store power level information for analysis PowerAnalysisTerms{ii} = helperExtractPowerAnalysisTerms(arrayTx,arrayRx,proppaths,nrcs,freq,prf,dr,df); end % parfor over all batches
Starting parallel pool (parpool) using the 'Processes' profile ... 11-Feb-2026 15:33:32: Job Queued. Waiting for parallel pool job with ID 2 to start ... 11-Feb-2026 15:34:33: Job Queued. Waiting for parallel pool job with ID 2 to start ... Connected to parallel pool with 10 workers.
For additional context, compute the direct path so you can to investigate the bistatic range and Doppler shift.
directPath = bistaticFreeSpacePath(freq, txPose,rxPose,IncludeDirectPath=true, ...
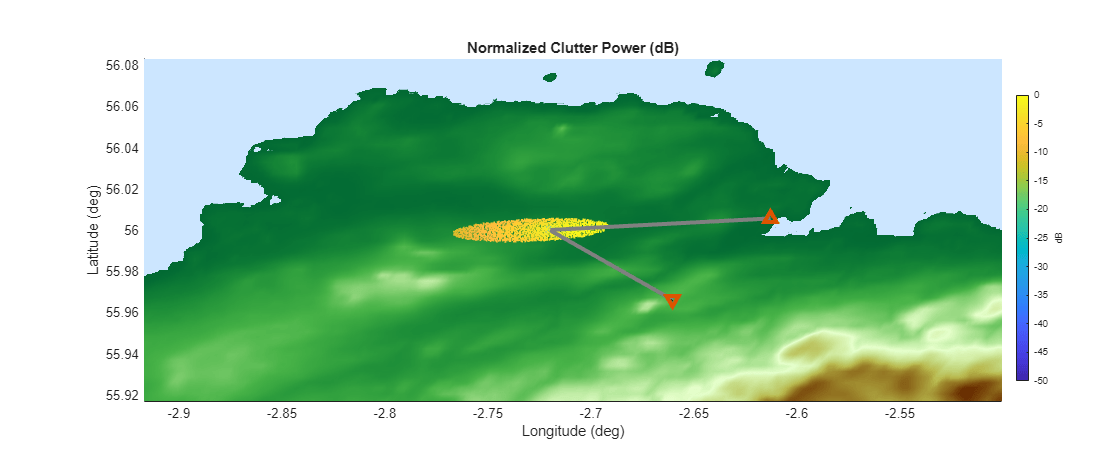
ReceiverMountingAngles=rxMntAng,TransmitterMountingAngles=txMntAng);Plot the power returned from each clutter patch (normalized to the strongest clutter return in the center of the main beam of the transmitter) and note how it is distributed spatially. You can see that the clutter in the main beam footprint is stronger closer to the transmitter and fades as bistatic range increases. If you set ClutterRegionSize to "Large Sector" you will also see the dominant beam pattern of the transmit antenna as a function of latitude and longitude.
viz.ClutterPowInLatLon(Z,R,PowerAnalysisTerms,cposes,cAreas,idxBatch,txPlat,rxPlat,aimPos)
In this section you have populated PowerAnalysisTerms with a variety of useful measurements for this scenario, parameterized by latitude, longitude as well as ambiguous bistatic range and Doppler. Below, select from some of the terms in the structure, and visualize them in latitude and longitude or range and Doppler. The optional selections are the following:
2-way Gain - The combined transmit gain and receiver gain in to each clutter patch, in dBi.
Norm. Clutter Pow - The clutter power returned from each clutter patch, normalized to the maximum, in dB.
Norm. BRCS - The normalized bistatic radar cross section from each clutter patch, as returned from
bistaticSurfaceReflectivityLand, in dB.Rx Az Ang. - The azimuth angle from the clutter patch to the radar receiver, in degrees.
Bistatic Doppler - The total bistatic range rate from transmitter to clutter patch plus clutter patch to receiver, wrapped from -PRF/2 to PRF/2, in Hz.
Bistatic Range - The total path length from transmitter to clutter patch plus clutter patch to receiver, wrapped to the unambiguous range, in km.
fieldname =  "G2wayDB";
viz.PowerAnalysis(R,PowerAnalysisTerms,fieldname,cposes,idxBatch,txPlat,rxPlat,aimPos,directPath)
"G2wayDB";
viz.PowerAnalysis(R,PowerAnalysisTerms,fieldname,cposes,idxBatch,txPlat,rxPlat,aimPos,directPath)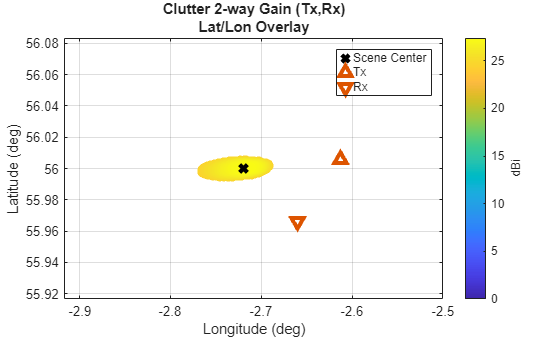
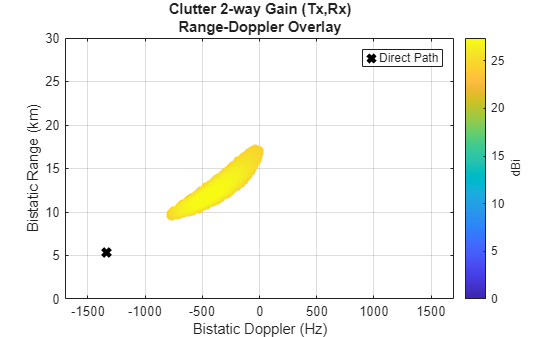
Explore the drop down menu to observe how the values change within the clutter region as a function of latitude and longitude or range and Doppler.
Simulate and Process Bistatic Clutter I/Q Data
You have laid the groundwork for straightforward I/Q generation and processing. Start from the scenario state after the power level analysis in the previous section.
I/Q Data Generation
Initialize the timer and pre-allocate the propagation signal that will store the I/Q data as it accumulates in the loop (propSig) by calling collect on the bistatic receiver. Create a loop to execute until the end of the CPI.
For each pulse, leverage the same parallel processing infrastructure and variables you created previously to parallelize your computation in batches. For each pulse, for each batch:
Compute the array of propagation paths using
bistaticFreeSpacePath,each of which contains the instantaneous bistatic range and Doppler. These will change from pulse to pulse.Replace the default
ReflectionCoefficientin the paths with the values computed in the previous section. We assume these are constant for the CPI.Add the direct path to the path set from the first batch.
Transmit the pulse using the cloned bistatic transmitter object. Recall, cloning the transmitter enables faster parallel processing.
Accumulate the I/Q data at the receiver using the cloned bistatic receiver object.
After the batch processing is completed, advance the scenario and platform positions in preparation for the next pulse. Extract the new txPose and rxPose for the next pulse. Continue the loop, pulse by pulse, until the end of the CPI.
% Setup timer totalTime = 0; tic; ipulse = 0; [propSig,propInfo] = collect(biRx,scene.SimulationTime); tEnd = nextTime(biRx); while time < tEnd viz.Progbar(ipulse,numPulsesSim) % Report progress ipulse = ipulse + 1; parfor ii = 1:numBatches idx = idxBatch{ii}; numThisBatch = length(idx); biTxP = biTxVec{ii}; biRxP = biRxVec{ii}; % 1. Calculate paths proppaths = bistaticFreeSpacePath(freq, txPose,rxPose,cposesCell{ii},IncludeDirectPath=false, ... ReceiverMountingAngles=rxMntAng,TransmitterMountingAngles=txMntAng); % 2. Replace default reflection coefficient split = num2cell(refCoeff{ii},1); [proppaths.ReflectionCoefficient] = deal(split{:}); % 3. Add direct path to the first batch if ii==1 dp_path = bistaticFreeSpacePath(freq, ... txPose,rxPose,IncludeDirectPath=true, ... ReceiverMountingAngles=rxMntAng,TransmitterMountingAngles=txMntAng); proppaths(end+1) = dp_path; %#ok<SAGROW> end % 4. Transmit [txSig,txInfo] = transmit(biTxP,proppaths,time); biTxVec{ii} = biTxP; % 5. Accumulate I/Q data at the receiver propSig = propSig + collect(biRxP,txSig,txInfo,proppaths); end % Update scenario advance(scene); time = scene.SimulationTime; helperAdvanceClutterGenerator(clutterConfigTx,clutterConfigRx,time); % Update platform positions poses = platformPoses(scene,"rotmat"); rxPose = poses(1); txPose = poses(2); end
120/128 pulses completed.
Upon completion of the pulses, use the collect method to complete the CPI at the bistatic receiver, and use the receive method to generate the I/Q at the receiver with the appropriate gains and additive noise levels.
% Receive collect(biRx,time); [iq,rxInfo] = receive(biRx,propSig,propInfo); % Track the final elapsed time elapsedTime = toc; totalTime = totalTime + elapsedTime; fprintf('%d/%d pulses completed.\n\tElapsed time = %0.2f sec\n\tTotal time = %0.2f sec\n', ... ipulse,numPulsesSim,elapsedTime,totalTime);
128/128 pulses completed. Elapsed time = 127.27 sec Total time = 127.27 sec
Now that the I/Q data are generated for the CPI, plot it to visualize the I/Q-level signal power. It is not necessary to have positive signal-to-noise (SNR) ratio at this stage prior to processing, but often the direct path will be strong enough to see. Notice the regular intervals of returns (likely the direct path and strong clutter returns) below.
% Plot received returns
viz.RawIQ(iq,rxInfo)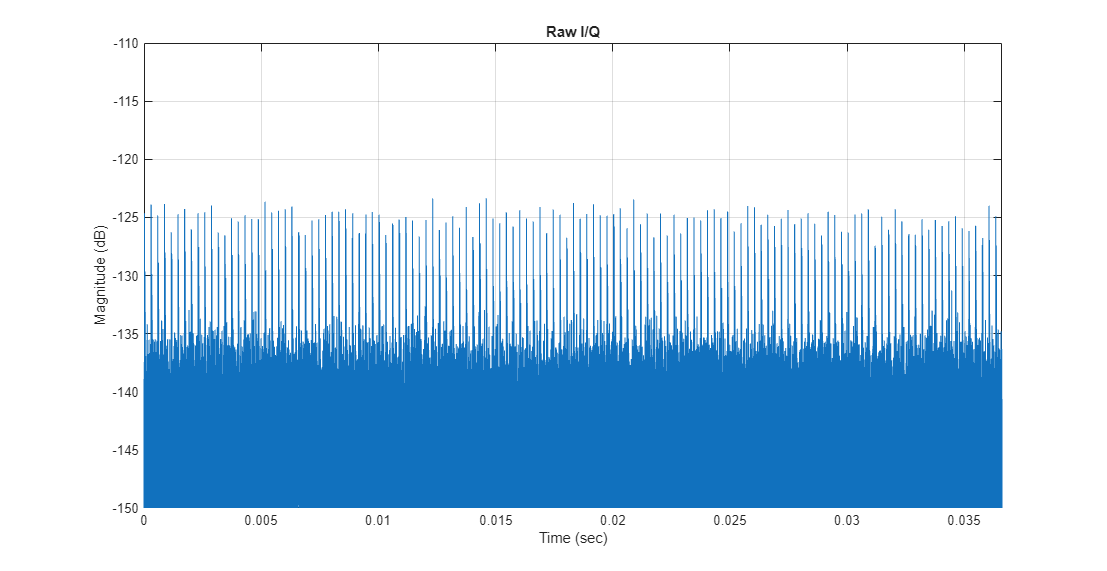
You can see regularly spaced pulses above the noise floor even without signal processing gains. This indicates strong direct path power. There is no discernible antenna pattern on this time scale.
The I/Q data has been stored as one long vector and the pulses returns need to be sorted into PRIs. Reshape the I/Q data into a matrix representing fast time in the row dimension and slow time in the column dimension. Visualize the resulting data cube, which for a single receive channel is simply a matrix of fast time samples by PRI.
numSamples = round(Fs*1/prf);
numSamplesCPI = numPulsesCPI.*numSamples;
yBi = iq(1:numSamplesCPI(1));
yBi = reshape(yBi,numSamples,numPulsesCPI);
% Plot bistatic fast time x slow time matrix
viz.Datacube(yBi)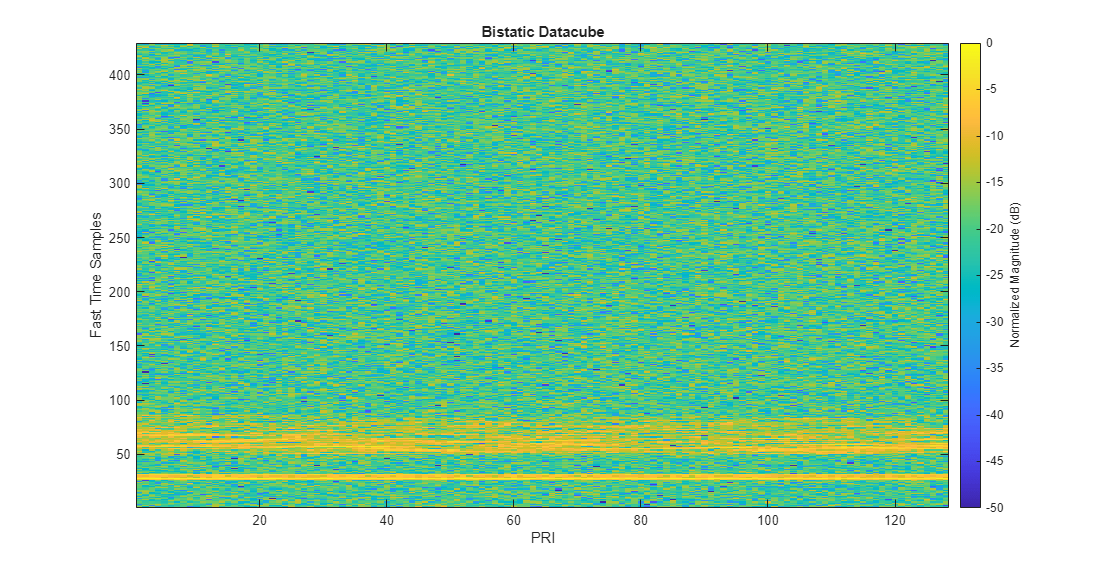
You will notice the alignment has been done correctly as the returns are forming a strong, horizontal band of energy starting around 25 fast time samples.
I/Q Processing
Process the data with the phased.RangeDopplerResponse function. Set the mode to 'Bistatic' to produce bistatic range and bistatic doppler axes vectors. Visualize the range-Doppler map (RDM).
% Perform matched filtering and Doppler processing rngdopresp = phased.RangeDopplerResponse(SampleRate=Fs,... Mode='Bistatic', ... DopplerFFTLengthSource='Property', ... DopplerFFTLength=2*numPulsesCPI, ... PRFSource='Property',PRF=prf); mfcoeff = getMatchedFilter(wav); [yBi,rngVec,dopVec] = rngdopresp(yBi,mfcoeff); % Plot RDM viz.RDMSNR(dopVec,rngVec,yBi)
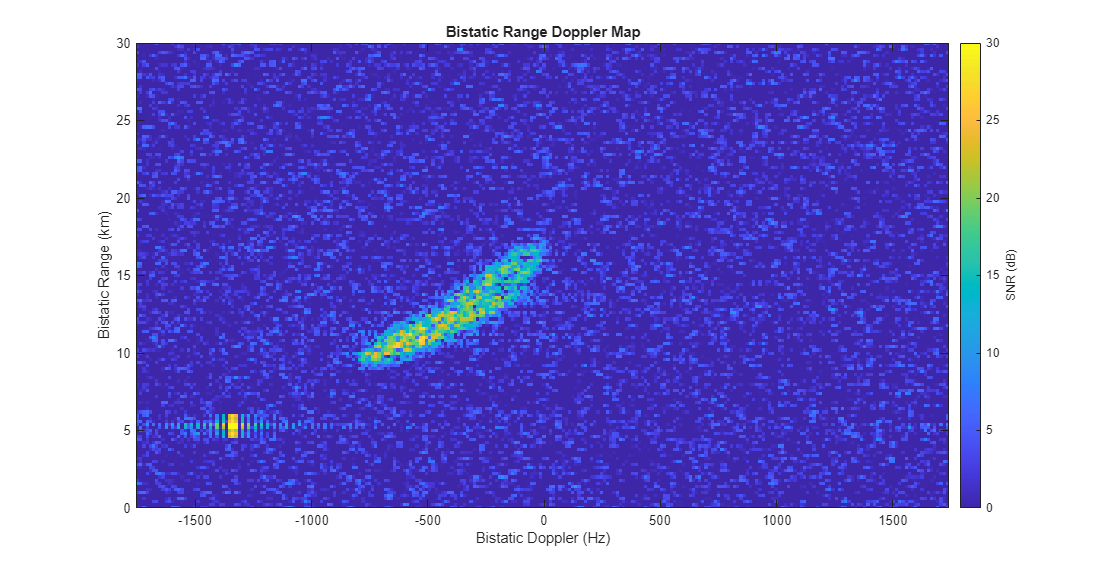
Note the direct path contribution in the lower left and the strong transmit main beam clutter on the right side. Sidelobes of the direct path in both range and Doppler are visible. If you set the ClutterRegionSize to "Large Sector," you will notice multiple transmit sidelobes and a strong ground bounce close to the direct path return.
Summary
In this example, you learned how to produce bistatic clutter with site-specific information by importing elevation data and leveraging the bistaticSurfaceReflectivityLand feature. You investigated power-level snapshots of the clutter gain, normalized power, normalized bistatic radar cross section, azimuth angle to the receiver, and bistatic range and Doppler. You simulated and processed I/Q data to produce bistatic range and Doppler maps of the clutter. Explore setting the ClutterRegionSize to "Large Sector" to produce a richer RDM where clutter in the transmit sidelobes is visible.
References
Willis, Nicholas J., and Hugh D. Griffiths, eds. "Advances in bistatic radar." Vol. 2. SciTech Publishing, 2007.
Maitland, C., D. Mountford, B. Hopson, A. Glass, J. Patel, E. Rose, P. Durham, and P. McGinley. "Development of a Bistatic Clutter Tool and Validation by Experimental Data." IET Conference Proceedings 2022, no. 17 (March 2, 2023): 125–29.
Helper Functions
helperComputeSurfaceAngles
function [angIn, angScat, angAz, txVector, rxVector] = helperComputeSurfaceAngles(txPos, rxPos, surfacePos, surfaceNormal) % Ensure txPos and rxPos are column vectors txPos = txPos(:); rxPos = rxPos(:); % Check if surfacePos and surfaceNormal are matrices [rows_pos, cols_pos] = size(surfacePos); [rows_norm, cols_norm] = size(surfaceNormal); % Determine if inputs are 3xN or Nx3 if rows_pos == 3 && cols_pos >= 1 % surfacePos is 3xN numSurfaces = cols_pos; else % surfacePos is Nx3 surfacePos = surfacePos'; numSurfaces = rows_pos; end if rows_norm == 3 && cols_norm >= 1 % surfaceNormal is 3xN if cols_norm ~= numSurfaces error('Number of surface normals must match number of surface positions'); end else % surfaceNormal is Nx3 surfaceNormal = surfaceNormal'; if rows_norm ~= numSurfaces error('Number of surface normals must match number of surface positions'); end end % Convert to unit vectors surfaceNormal = surfaceNormal ./ vecnorm(surfaceNormal,2,1); % Compute vectors from each surface to transmitter and receiver txVector = txPos - surfacePos; rxVector = rxPos - surfacePos; % Convert to unit vectors txVector = txVector ./ vecnorm(txVector,2,1); rxVector = rxVector ./ vecnorm(rxVector,2,1); % Define the axes used to compute the surface angles as: % z: clutter patch normal % x: vector from Tx to clutter patch projected onto the clutter patch % y = cross(z,x) laxes = zeros(3,3,numSurfaces); uz = surfaceNormal ./ vecnorm(surfaceNormal,2,1); laxes(:,3,:) = uz; ux = -txVector; ux = ux - sum(ux .* uz) .* uz; % Project onto plane containing the surface patch ux = ux ./ vecnorm(ux,2,1); laxes(:,1,:) = ux; uy = cross(uz,ux,1); uy = uy ./ vecnorm(uy,2,1); laxes(:,2,:) = uy; % Rotate our transmit and receive vectors into this coordinate frame txVector = squeeze(pagemtimes(laxes,'transpose',reshape(txVector,3,1,[]),'none')); % All "y's" will be zero, since the local axes are aligned so that x points from the transmitter to the patch rxVector = squeeze(pagemtimes(laxes,'transpose',reshape(rxVector,3,1,[]),'none')); [~,ph] = cart2sph(txVector(1,:),txVector(2,:),txVector(3,:)); angIn = rad2deg(ph); [th,ph] = cart2sph(rxVector(1,:),rxVector(2,:),rxVector(3,:)); angScat = rad2deg(ph); angAz = rad2deg(th); end
helperGetClutterPatches
function [cposes, cAreas, cNormals] = helperGetClutterPatches(clutgenTx,clutgenRx,srf) % Get clutter patches earth = wgs84Ellipsoid; % Initialize clutter patch data, clutter occluded along LOS to TX handled % here and those clutter targets are not included clutterTargets(clutgenTx); % Get clutter patch data patchStruct = clutgenTx.LastPatchData; % Convert patch normal vectors and positions to ECEF [lpX,lpY,lpZ] = enu2ecef(patchStruct.Normals(1,:),patchStruct.Normals(2,:),patchStruct.Normals(3,:),srf.LocalOrigin(1),srf.LocalOrigin(2),srf.LocalOrigin(3),earth); cNormals = [lpX; lpY; lpZ]; % Determine number of patches numPatches = numel(lpX); % Compute clutter patch positions cposes = repmat(struct("Position",[0 0 0]),1,numPatches); [cX,cY,cZ] = geodetic2ecef(earth,patchStruct.Centers(1,:),patchStruct.Centers(2,:),patchStruct.Centers(3,:)); split = num2cell([cX;cY;cZ].',2); [cposes.Position] = deal(split{:}); % Extract clutter patch Areas cAreas = patchStruct.Areas; % Remove patches with no LOS to the Receiver % Generate clutter facets visible by RX-centered clutter ring clutterTargets(clutgenRx); rxTmpPatchStruct = clutgenRx.LastPatchData; % Use the Facet Index to trace back to the surface structure and identify % the intersection patchesWithLosToRx = ismember(patchStruct.FacetIndex,rxTmpPatchStruct.FacetIndex); % Keep only the patches in the user-defined clutter region cAreas = cAreas(patchesWithLosToRx); cNormals = cNormals(:,patchesWithLosToRx); cposes = cposes(patchesWithLosToRx); end
helperBatchIdx
function [idxBatch,cposesCell,cAreasCell,cNormalsCell] = helperBatchIdx(maxNumPatchesPerBatch,numPatches,cposes,cAreas,cNormals) % Batch clutter last patch data for parfor processing maxNumPatchesPerBatch = min(maxNumPatchesPerBatch,numPatches); numBatches = ceil(numPatches/maxNumPatchesPerBatch); idxBatch = cell(1,numBatches); cAreasCell = cell(1,numBatches); cNormalsCell = cell(1,numBatches); cposesCell = cell(1,numBatches); idxStart = 1; idxEnd = min(maxNumPatchesPerBatch,numPatches); for ii = 1:numBatches idxBatch{ii} = idxStart:idxEnd; cAreasCell{ii} = cAreas(idxStart:idxEnd); cposesCell{ii} = cposes(idxStart:idxEnd); cNormalsCell{ii} = cNormals(:,idxStart:idxEnd); idxStart = min(idxEnd + 1,numPatches); idxEnd = min(idxEnd + maxNumPatchesPerBatch,numPatches); end end
helperVerifyRxRngAngle
function [rxRng,betaAim] = helperVerifyRxRngAngle(txPos,rxPos,aimPos) % Reference ellipsoid wgs84 = wgs84Ellipsoid; % Return ENU positions of TX and RX centered at the scene center [txE,txN,txU] = geodetic2enu(txPos(1),txPos(2),txPos(3),aimPos(1),aimPos(2),aimPos(3),wgs84); % Position of TX in ENU centered at scene center [rxE,rxN,rxU] = geodetic2enu(rxPos(1),rxPos(2),rxPos(3),aimPos(1),aimPos(2),aimPos(3),wgs84); % Position of TX in ENU centered at scene center txENU = [txE,txN,txU]; rxENU = [rxE,rxN,rxU]; rxRng = norm(rxENU); dot_product = dot(txENU,rxENU); cross_magnitude = norm(cross(txENU,rxENU)); betaAim = atan2d(cross_magnitude,dot_product); end
helperAdvanceClutterGenerator
function helperAdvanceClutterGenerator(rdrTx,rdrRx,time) % Step monostatic radar to move time tmpPath = struct("PathLength",1,"PathLoss",0,"ReflectionCoefficient",1,"AngleOfDeparture",[0;0],"AngleOfArrival",[0;0],"DopplerShift",0); step(rdrTx,tmpPath,time); step(rdrRx,tmpPath,time); end
helperExtractPowerAnalysisTerms
function plotInfo = helperExtractPowerAnalysisTerms(arrayTx,arrayRx,proppaths,nrcs,freq,prf,dr,df) lambda = physconst('LightSpeed')/freq; % Estimate Transmit Gain GtDB = directivity(arrayTx,freq,[proppaths.AngleOfDeparture]).'; GrDB = directivity(arrayRx,freq,[proppaths.AngleOfArrival]).'; G2wayDB = GtDB + GrDB; % Path loss PathLossdB = [proppaths.PathLoss]; % estimate brcs dB brcs = abs([proppaths.ReflectionCoefficient]).^2/4/pi*lambda.^2; brcsdB = pow2db(brcs); % Save off other information for plotting and analysis plotInfo.G2wayDB = G2wayDB; % two way antenna pattern gain plotInfo.brcsdB = brcsdB; % Bistatic RCS (dBsm) plotInfo.PathLossInvDB = -PathLossdB; % Inverse of the Path Loss (dB), so that high color in analysis plots always correlates to more power plotInfo.normalizedPcl = plotInfo.G2wayDB + plotInfo.brcsdB + plotInfo.PathLossInvDB; % components of the SNR that drive variability plotInfo.nrcsDB = pow2db(nrcs).'; % Normalized bistatic RCS (dB) AoA = [proppaths.AngleOfArrival]; plotInfo.RxAz = AoA(1,:); plotInfo.AmbRange = mod([proppaths.PathLength],physconst('LightSpeed')/prf); % Ambiguous Bistatic Range plotInfo.AmbDoppler = mod([proppaths.DopplerShift]+prf/2,prf)-prf/2; % Ambiguous Bistatic Doppler plotInfo.GtDB = GtDB; % Transmit gain to patch plotInfo.GrDB = GrDB; % Receiver gain to patch plotInfo.BistaticRange = [proppaths.PathLength]; plotInfo.BistaticDoppler = [proppaths.DopplerShift]; plotInfo.AmbRangeBin = ceil(mod(plotInfo.BistaticRange,physconst('lightspeed')/prf)/dr); plotInfo.AmbDoppBin = ceil(mod(plotInfo.BistaticDoppler+prf/2,prf)/df); plotInfo.RangeVec = 0:dr:(dr*(physconst('Lightspeed')/prf-1)); plotInfo.DoppVec = -prf/2:df:(prf/2-df); end
See Also
bistaticSurfaceReflectivityLand | radarScenario | bistaticTransmitter | bistaticReceiver | radarTransceiver | clutterGenerator