generalizedInverseKinematics
Crear un solver de cinemática inversa multirestricciones
Descripción
El generalizedInverseKinematics System object™ resuelve una configuración de articulación para un objeto rigidBodyTree especificado que cumple un conjunto de restricciones cinemáticas no lineales o devuelve la solución factible más cercana cuando el solver no puede cumplir todas las restricciones.
Especifique los tipos de restricción, ConstraintInputs, antes de llamar al objeto. Para cambiar las entradas de las restricciones después de llamar al objeto, llame a release(.gik)
Especifique las entradas de las restricciones como objetos de restricción y llame a generalizedInverseKinematics con dichos objetos pasados a él. Para crear objetos de restricción, utilice los siguientes objetos:
Si la única restricción es la posición y la orientación del efector final, considere utilizar inverseKinematics como solver en su lugar.
Para obtener soluciones de cinemática inversa analíticas de forma cerrada, consulte analyticalInverseKinematics.
Para resolver las restricciones de cinemática inversa generalizada:
Cree el objeto
generalizedInverseKinematicsy configure sus propiedades.Llame al objeto con argumentos, como si fuera una función.
Para más información sobre el funcionamiento de los System objects, consulte ¿Qué son los System Objects?
Creación
Descripción
gik = generalizedInverseKinematicsrigidBodyTree y la propiedad ConstraintInputs antes de utilizar este solver.
gik = generalizedInverseKinematics(PropertyName=Value)generalizedInverseKinematics(RigidBodyTree=rigidbodytree,ConstraintInputs=inputTypes) crea un solver de cinemática inversa generalizada con el modelo de árbol de cuerpo rígido y las entradas de restricción previstas especificadas.
Propiedades
Uso
Descripción
[ encuentra una configuración de articulación, configSol,solInfo] = gik(initialguess,constraintObj,...,constraintObjN)configSol, basada en la estimación inicial y una lista separada por comas de objetos de descripción de restricciones. El número de descripciones de restricciones depende de la propiedad ConstraintInputs.
Argumentos de entrada
Argumentos de salida
Funciones del objeto
Para usar una función de objeto, especifique el System object como el primer argumento de entrada. Por ejemplo, para liberar recursos de sistema de un System object llamado obj, utilice la siguiente sintaxis:
release(obj)
Ejemplos
Utilice la cinemática inversa generalizada (GIK), con el algoritmo del solver SQP fmincon, para encontrar configuraciones donde el efector final apunte hacia abajo dentro de determinados límites.
Cargue un modelo de robot y cree un solver de GIK. Establezca el algoritmo del solver en SQP fmincon.
robot = loadrobot("universalUR5",DataFormat="row"); gik = generalizedInverseKinematics( ... RigidBodyTree=robot, ... SolverAlgorithm="fminconsqp", ... ConstraintInputs={"orientation","cartesian"});
Defina una restricción de objetivo de orientación y una restricción de límites cartesianos.
ee = robot.BodyNames{end};
oriTgt = constraintOrientationTarget(ee);
oriTgt.TargetOrientation = eul2quat([0 pi 0],"ZYX");
cartBnds = constraintCartesianBounds(ee);
cartBnds.Bounds = [-0.4 0.4; 0.4 0.8; 0.0 0.4];Establezca una configuración de estimación inicial y resuelva la configuración que cumpla las restricciones de objetivo de orientación y límites cartesianos.
initGuessConfig = [pi/2 -pi/3 0 0 0 0]; [config,solutionInfo] = gik(initGuessConfig,oriTgt,cartBnds);
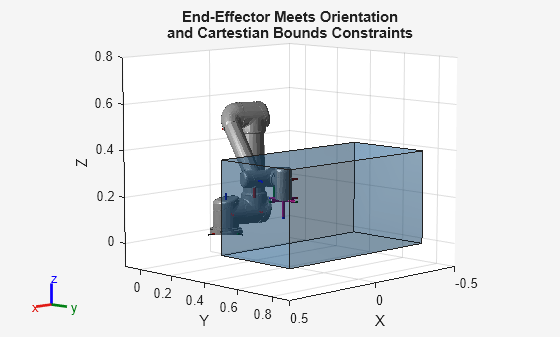
Visualice la configuración devuelta por el solver y utilice la función auxiliar exampleHelperShowCartesianBounds para visualizar los límites cartesianos como parche transparente.
show(robot,config); title(["End-Effector Meets Orientation","and Cartestian Bounds Constraints"]); axis([-0.5 0.5 -0.1 0.9 -0.1 0.8]) exampleHelperShowCartesianBounds(cartBnds.Bounds,0.3) hold off
Cree un solver de cinemática inversa generalizada que sostenga un brazo robótico en una ubicación específica y apunte hacia la base del robot. Cree los objetos de restricción para pasar los parámetros de restricción necesarios al solver.
Cargue el modelo de robot KUKA iiwa 14 de Robotics System Toolbox™ loadrobot, devuelto como un objeto rigidBodyTree.
manipulator = loadrobot("kukaIiwa14");Cree el objeto System object™ para resolver la cinemática inversa generalizada.
gik = generalizedInverseKinematics;
Configure el objeto System object para utilizar el robot KUKA LBR.
gik.RigidBodyTree = manipulator;
Indique al solver que espere un objeto constraintAiming y constraintPositionTarget como entradas de restricción.
gik.ConstraintInputs = {"position","aiming"};Cree los dos objetos de restricción.
El origen del cuerpo denominado
iiwa_link_ee_kukaestá situado en[0.0 0.5 0.5]respecto al marco base del robot.El eje z del cuerpo denominado
iiwa_link_ee_kukaapunta hacia el origen del marco base del robot.
posTgt = constraintPositionTarget("iiwa_link_ee_kuka"); posTgt.TargetPosition = [0.0 0.5 0.5]; aimCon = constraintAiming("iiwa_link_ee_kuka"); aimCon.TargetPoint = [0.0 0.0 0.0];
Encuentre una configuración que cumpla las restricciones. Debe pasar los objetos de restricción al objeto System object en el orden en que se especificaron en la propiedad ConstraintInputs. Especifique una estimación inicial sobre la configuración del robot.
q0 = homeConfiguration(manipulator); % Initial guess for solver
[q,solutionInfo] = gik(q0,posTgt,aimCon);Visualice la configuración devuelta por el solver.
show(manipulator,q);
title(sprintf("Solver status: %s", solutionInfo.Status))
axis([-0.75 0.75 -0.75 0.75 -0.5 1])
Represente un segmento de rectas desde la posición objetivo hasta el origen de la base. El origen del marco tool0 coincide con un extremo del segmento y su eje z está alineado con el segmento.
hold on plot3([0.0 0.0],[0.5 0.0],[0.5 0.0],"--o") hold off

Capacidades ampliadas
Historial de versiones
Introducido en R2017aConsulte también
Objetos
analyticalInverseKinematics|inverseKinematics|constraintPoseTarget|constraintPositionTarget|constraintAiming|constraintCartesianBounds|constraintJointBounds|constraintOrientationTarget|constraintDistanceBounds|constraintFixedJoint|constraintPrismaticJoint|constraintRevoluteJoint