Cinemática inversa
La cinemática inversa (IK) determina las configuraciones de articulaciones necesarias para que un modelo de robot logre la posición del efector final deseada. Las restricciones cinemáticas del robot se especifican en el modelo de robot rigidBodyTree en función de la transformación entre articulaciones. Puede utilizar la cinemática inversa generalizada (GIK) para resolver configuraciones que satisfagan restricciones, como una restricción de apuntamiento para un brazo de cámara o un cuadro delimitador cartesiano en el enlace de un determinado cuerpo rígido. Especifique parámetros para estas restricciones con los objetos Restricciones de robot de GIK y envíelos a un objeto generalizedInverseKinematics.
Para obtener más información sobre la cinemática inversa, consulte la página What Is Inverse Kinematics?.
Apps
| Inverse Kinematics Designer | Design inverse kinematics solvers, configurations, and waypoints (Desde R2022a) |
Funciones
Bloques
| Inverse Kinematics | Calcular configuraciones de articulación para lograr una pose del efector final |
Temas
- Algoritmos de cinemática inversa
Descripción de los algoritmos del solver de cinemática inversa y de los parámetros del solver
- Inverse Kinematics for Robots with Floating Base
Calculate inverse kinematics for floating-base systems such as manipulators in space. (Desde R2024a)
- Modelado de control de trayectoria con cinemática inversa
Dirija un manipulador a lo largo de una trayectoria especificada usando el bloque Inverse Kinematics de Simulink®.
Información relacionada
Ejemplos destacados

Trazado de rutas en 2D con cinemática inversa
Calcular la cinemática inversa de un manipulador 2D simple.

Solve Inverse Kinematics for Closed Loop Linkages
Model closed-loop linkages like four-bar systems using constraints with an inverse kinematics solver.
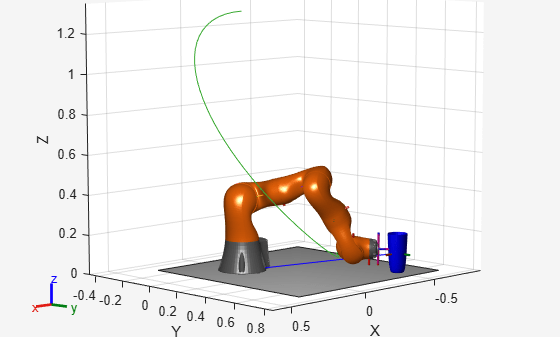
Planificar una trayectoria de alcance con múltiples restricciones cinemáticas
Planifique una trayectoria de manipulador con restricciones para una aproximación precisa de la pinza usando cinemática inversa generalizada.

Plan Manipulator Path for Dispensing Task Using Inverse Kinematics Designer
Design a collision-free manipulator path for adhesive dispensing using Inverse Kinematics Designer app.