Representar un vehículo de Ackermann en Simulink
En este ejemplo se muestra cómo representar la posición de un bloque Ackermann Kinematic Model y cambiar la velocidad del vehículo y la velocidad angular de giro en tiempo real.
Abra el modelo de Simulink.
open_system("plotAckermannDriveSimulinkModel.slx");Bloque Ackermann Kinematic Model
Los parámetros del bloque Ackermann Kinematic Model son valores predeterminados, pero es importante observar dos parámetros en este ejemplo: el rango de velocidad del vehículo y el ángulo de dirección máximo. Ambos parámetros limitan el movimiento del vehículo. El límite inferior del parámetro rango de velocidad del vehículo se establece en -inf y el límite superior en inf, de modo que la velocidad del vehículo puede ser cualquier valor real que establezca. El ángulo de dirección máximo se establece en pi/4, de modo que existe un radio de giro máximo que el vehículo puede alcanzar.
Velocidad del vehículo y de giro
El bloque Ackermann Kinematic Model toma dos entradas: la velocidad del vehículo y la velocidad angular de giro. Este modelo usa bloques Slider Gain para cambiar las entradas.
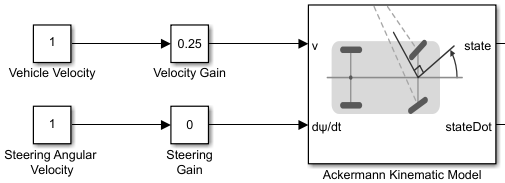
Estos valores pueden ser cualquier valor real dentro de las restricciones del parámetro establecidas en el bloque Ackermann Kinematic Model.
Representación gráfica de señales de salida
Si se utiliza un bloque demux, las señales x e y de la salida state se conectan con un bloque XY Graph. Las señales de stateDot y las otras dos señales de state se conectan con bloques Display.

Ejecutar el modelo
Establezca el tiempo de ejecución del modelo en
inf.Haga clic en Play para ejecutar el modelo. El grafo aparecerá y podrá ver la trayectoria del vehículo.
Abra los bloques Slider Gain y ajuste los valores para ver cómo afectan a la trayectoria del vehículo.
Ajuste los límites del grafo según sea necesario.
Observe la visualización de Steering Angle a medida que ajusta el valor de Steering Gain.