sosfilt
Filtrado digital IIR de segundo orden (bicuadrático)
Descripción
y = sosfilt(sos,x)sos a la señal de entrada x.
Si
xes una matriz, la función opera a lo largo de la primera dimensión y devuelve los datos filtrados para cada columna.Si
xes un arreglo multidimensional, la función opera a lo largo de la primera dimensión del arreglo con un tamaño mayor que 1.
Ejemplos
Cargue chirp.mat. El archivo contiene una señal, y, que tiene la mayor parte de su potencia por encima de Fs/4, o la mitad de la frecuencia de Nyquist. La tasa de muestreo es 8192 Hz.
load chirp
t = (0:length(y)-1)/Fs;Diseñe un filtro paso alto Butterworth de 7.º orden para atenuar los componentes de la señal por debajo de Fs/4. Utilice una frecuencia de corte normalizada de 0,48π rad/muestra. Exprese los coeficientes del filtro en términos de secciones de segundo orden.
[zhi,phi,khi] = butter(7,0.48,'high');
soshi = zp2sos(zhi,phi,khi);
freqz(soshi)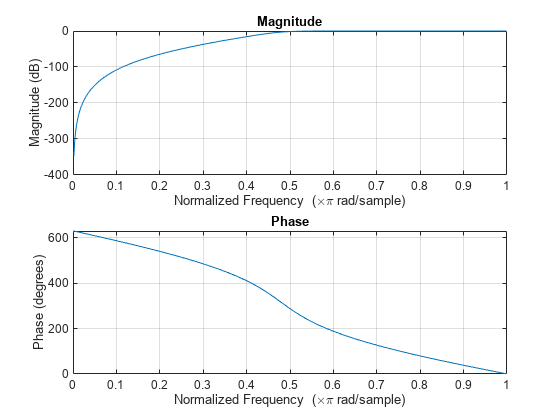
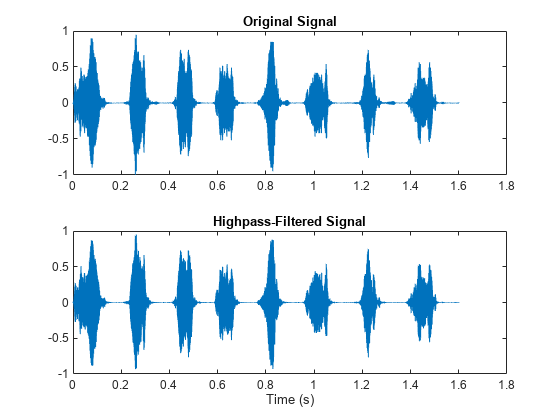
Filtre la señal. Muestre las señales originales y las filtradas en paso alto. Utilice la misma escala de eje y en ambas gráficas.
outhi = sosfilt(soshi,y); figure subplot(2,1,1) plot(t,y) title('Original Signal') ys = ylim; subplot(2,1,2) plot(t,outhi) title('Highpass-Filtered Signal') xlabel('Time (s)') ylim(ys)
Diseñe un filtro paso bajo con las mismas especificaciones. Filtre la señal y compare el resultado con el original. Utilice la misma escala de eje y en ambas gráficas. El resultado es mayoritariamente ruido.
[zlo,plo,klo] = butter(7,0.48); soslo = zp2sos(zlo,plo,klo); outlo = sosfilt(soslo,y); subplot(2,1,1) plot(t,y) title('Original Signal') ys = ylim; subplot(2,1,2) plot(t,outlo) title('Lowpass-Filtered Signal') xlabel('Time (s)') ylim(ys)

Argumentos de entrada
Argumentos de salida
Referencias
[1] Bank, Balázs. "Converting Infinite Impulse Response Filters to Parallel Form". IEEE Signal Processing Magazine. Vol. 35, Number 3, May 2018, pp. 124-130.
[2] Orfanidis, Sophocles J. Introduction to Signal Processing. Englewood Cliffs, NJ: Prentice-Hall, 1996.
Capacidades ampliadas
Historial de versiones
Introducido antes de R2006a
Consulte también
filter | medfilt1 | sgolayfilt