upfirdn
Sobremuestrear, apliqcar filtro FIR y submuestrear
Descripción
Ejemplos
Cambie la tasa de muestreo de una señal con un factor de conversión racional de una tasa DAT de 48 kHz a la tasa de muestreo CD de 44,1 kHz. Utilice la función rat para encontrar el numerador L y el denominador M del factor racional.
Fdat = 48e3; Fcd = 44.1e3; [L,M] = rat(Fcd/Fdat)
L = 147
M = 160
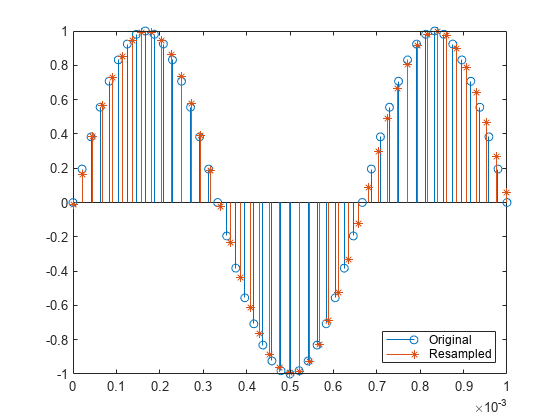
Genere una sinusoide de 1,5 kHz muestreada a durante 0,25 segundos. Represente el primer milisegundo de la señal.
t = 0:1/Fdat:0.25-1/Fdat;
x = sin(2*pi*1.5e3*t);
stem(t,x)
xlim([0 0.001])
hold on
Diseñe un filtro paso bajo anti-aliasing mediante una ventana de Kaiser. Establezca los bordes de banda del filtro en el 90% y el 110% de la frecuencia de corte, . Especifique una ondulación de la banda de paso de 5 dB y una atenuación de la banda de parada de 40 dB. Establezca la ganancia de la banda de paso en L.
f = (Fdat/2)*min(1/L,1/M); d = designfilt('lowpassfir', ... 'PassbandFrequency',0.9*f,'StopbandFrequency',1.1*f, ... 'PassbandRipple',5,'StopbandAttenuation',40, ... 'DesignMethod','kaiserwin','SampleRate',48e3); h = L*tf(d);
Utilice upfirdn con el filtro h para remuestrear la sinusoide. Calcule y compense el retardo introducido por el filtro. Genere el vector de tiempo remuestreado correspondiente.
y = upfirdn(x,h,L,M); delay = floor(((filtord(d)-1)/2-(L-1))/L); y = y(delay+1:end); t_res = (0:(length(y)-1))/Fcd;
Superponga la señal remuestreada en la gráfica.
stem(t_res,y,'*') legend('Original','Resampled','Location','southeast') hold off
Argumentos de entrada
Argumentos de salida
Sugerencias
Las combinaciones válidas de los tamaños de xin y h son:
xines un vector yhes un vector.Las entradas son un filtro y una señal, así que la función convoluciona
xinconh. La señal de salidayoutes un vector fila sixines un vector fila; de lo contrario,youtes un vector columna.xines una matriz yhes un vector.Las entradas son un filtro y muchas señales, así que la función convoluciona
hcon cada columna dexin. Elyoutresultante es una matriz con el mismo número de columnas quexin.xines un vector yhes una matriz.Las entradas son varios filtros y una señal, así que la función convoluciona cada columna de
hconxin. Elyoutresultante es una matriz con el mismo número de columnas queh.xines una matriz yhes una matriz, ambos con el mismo número de columnas.Las entradas son varios filtros y varias señales, por lo que la función convoluciona las columnas de
xinyhcorrespondientes. Elyoutresultante es una matriz con el mismo número de columnas quexinyh.
Algoritmos
upfirdn utiliza una estructura de interpolación polifase. El número de operaciones de multiplicación y suma en la estructura polifase es de aproximadamente (LhLx – pLx)/q donde Lh y Lx son las longitudes de h(n) y x(n), respectivamente. En el caso de las señales largas, esta fórmula es, a menudo, exacta.
upfirdn realiza una cascada de tres operaciones:
Sobremuestrear los datos de entrada en la matriz
xinpor un factor del enterop(insertando ceros)Aplicar un filtro FIR a los datos de la señal sobremuestreada con la secuencia de respuesta al impulso especificada en el vector o la matriz
hSubmuestrear el resultado por un factor del entero
q(descartando muestras)
El filtro FIR suele ser un filtro paso bajo, que debe diseñar utilizando otra función como firpm o fir1.
Referencias
[1] Crochiere, R. E. "A General Program to Perform Sampling Rate Conversion of Data by Rational Ratios." Programs for Digital Signal Processing (Digital Signal Processing Committee of the IEEE Acoustics, Speech, and Signal Processing Society, eds.). New York: IEEE Press, 1979, Programs 8.2-1–8.2-7.
[2] Crochiere, R. E., and Lawrence R. Rabiner. Multirate Digital Signal Processing. Englewood Cliffs, NJ: Prentice-Hall, 1983.