Distributed Computing with MATLAB, Simulink, and ROS
From the series: Implementation
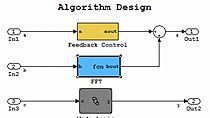
Sebastian Castro and Connell D’Souza discuss practical techniques for distributing robotics algorithms using the Robot Operating System (ROS). They will demonstrate how to partition a Simulink® model based on functionality and execution rate, and how these algorithm components can be deployed to different ROS-enabled platforms.
Sebastian and Connell will also show how to use custom ROS message definitions to efficiently share data between system components. Once the components have been deployed as standalone executables, they will show how they can be managed from MATLAB® or outside MATLAB.
You will see a demonstration of the concepts above through an autonomous object tracking example. This example implements best practices with Simulink and Robotics System Toolbox™. It also highlights the modularity of MATLAB and ROS by showing the algorithm using real and simulated TurtleBot® robotic platforms.
- Download all template and example files on the MATLAB Central File Exchange
- Learn about ROS custom message support with Robotics System Toolbox
- Find out more about robotics with MATLAB and Simulink
Published: 29 Dec 2017