Diseñar controladores PID con PID Tuner
En Control System Toolbox™, PID Tuner permite realizar el ajuste automático e interactivo de controladores PID para plantas representadas mediante modelos LTI.
Para obtener más información sobre cómo usar PID Tuner para ajustar un bloque PID Controller en un modelo de Simulink®, consulte Introduction to Model-Based PID Tuning in Simulink (Simulink Control Design).
Visión general de PID Tuner
Utilice PID Tuner para diseñar de manera interactiva un controlador PID SISO en una configuración de control de lazo simple y retroalimentación negativa.

PID Tuner diseña automáticamente un controlador para la planta. Especifique el tipo de controlador (P, I, PI, PD, PDF, PID, PIDF) y la forma (paralela o estándar).
También puede utilizar PID Tuner para diseñar un controlador PID de 2-DOF para la configuración de retroalimentación de la siguiente ilustración:

PID Tuner puede diseñar controladores PID de 2-DOF en los que los pesos de referencia pueden ser parámetros libres y ajustables. PID Tuner también puede diseñar controladores en los que los pesos de referencia son fijos en las configuraciones de control comunes, como I-PD y PI-D.
Puede analizar el diseño utilizando diversas gráficas de respuesta y ajustar el diseño de manera interactiva para cumplir los requisitos de rendimiento.
Para iniciar PID Tuner, utilice el comando pidTuner:
pidTuner(sys,type)
donde sys es un modelo lineal de la planta que desea controlar y type indica el tipo de controlador que desea diseñar.
Como alternativa, introduzca
pidTuner(sys,Cbase)
donde Cbase es un controlador de referencia, que permite comparar el rendimiento del controlador diseñado con el rendimiento de Cbase.
Para obtener más información sobre sys y Cbase, consulte la página de referencia de pidTuner.
Nota
También puede abrir PID Tuner desde MATLAB® desktop, en la pestaña Apps. Después, use el menú Plant de PID Tuner para especificar el modelo de planta.
Tipo de controlador PID
Para seleccionar el tipo de controlador, utilice uno de estos métodos:
Especificar el tipo cuando se abre la app: proporcione el argumento
typeen el comandopidTunercuando abra PID Tuner. Por ejemplo,pidTuner(G,'PIDF2')abre PID Tuner con un diseño inicial que es un controlador PID de 2-DOF con un filtro en el término derivativo.Especificar el tipo con un objeto de controlador existente: proporcione el argumento del controlador de referencia
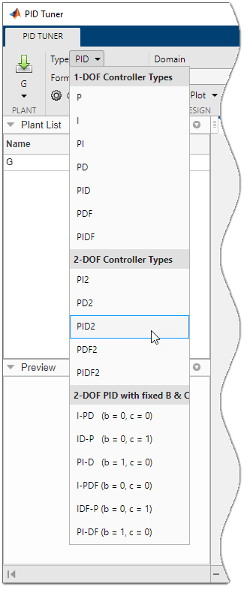
Cbaseen el comandopidTunercuando abra PID Tuner. PID Tuner diseña un controlador del mismo tipo queCbase. Por ejemplo, supongamos queC0es un objeto de controladorpidque solo tiene una acción proporcional y derivativa (controlador PD). Después,pidTuner(G,C0)abre PID Tuner con un diseño inicial que es un controlador PD.Especificar el tipo de controlador dentro de la app: en PID Tuner, utilice el menú Type para cambiar los tipos de controlador.
Las siguientes tablas resumen los tipos de controlador PID disponibles. Para obtener más información acerca de estos tipos de controlador, consulte PID Controller Types for Tuning.
Controladores de 1-DOF
Entrada type en pidTuner | Registro en el menú Type | Acciones del controlador |
|---|---|---|
'P' | P | Solo proporcional |
'I' | I | Solo integral |
'PI' | PI | Proporcional e integral |
'PD' | PD | Proporcional y derivativo |
'PDF' | PDF | Proporcional y derivativo con filtro de primer orden en el término derivativo |
'PID' | PID | Proporcional, integral y derivativo |
'PIDF' | PIDF | Proporcional, integral y derivativo con filtro de primer orden en el término derivativo |
Controladores de 2-DOF
PID Tuner puede diseñar tipos de controlador PID de 2-DOF de manera automática con pesos de referencia libres. Las siguientes tablas resumen los tipos de controlador 2-DOF de PID Tuner. Para más información sobre los controladores PID de 2-DOF en general, consulte Controladores PID de dos grados de libertad.
Entrada type en pidTuner | Registro en el menú Type | Acciones del controlador |
|---|---|---|
'PI2' | PI2 | Proporcional e integral de 2-DOF |
'PD2' | PD2 | Proporcional y derivativo de 2-DOF |
'PDF2' | PDF2 | Proporcional y derivativo de 2-DOF con filtro de primer orden en el término derivativo |
'PID2' | PID2 | Proporcional, integral y derivativo de 2-DOF |
'PIDF2' | PIDF2 | Proporcional, integral y derivativo de 2-DOF con filtro de primer orden en el término derivativo |
Controladores de 2-DOF con pesos de referencia fijos
Utilice PID Tuner para diseñar los tipos de controlador con pesos de puntos de referencia fijos resumidos en la siguiente tabla. Para obtener más información acerca de estos tipos de controlador, consulte PID Controller Types for Tuning.
Entrada type en pidTuner | Registro en el menú Type | Acciones del controlador |
|---|---|---|
'I-PD' | I-PD | PID de 2-DOF con b = 0, c = 0 |
'I-PDF' | I-PDF | PIDF de 2-DOF con b = 0, c = 0 |
'ID-P' | ID-P | PID de 2-DOF con b = 0, c = 1 |
'IDF-P' | IDF-P | PIDF de 2-DOF con b = 0, c = 1 |
'PI-D' | PI-D | PID de 2-DOF con b = 1, c = 0 |
'PI-DF' | PI-DF | PIDF de 2-DOF con b = 1, c = 0 |
Tipos de controlador en tiempo discreto
Si sys es un modelo en tiempo discreto con un tiempo de muestreo Ts, PID Tuner diseña un controlador pid en tiempo discreto usando la fórmula de integrador discreto ForwardEuler. Para diseñar un controlador que tenga fórmulas de integrador discreto diferentes, utilice uno de los siguientes métodos:
Proporcione un controlador de referencia en tiempo discreto
Cbaseal comando de iniciopidTuner. PID Tuner diseña un controlador que tiene las mismas fórmulas de integrador discreto queCbase.Después de iniciar PID Tuner, haga clic en Options para abrir el cuadro de diálogo Controller Options. Seleccione fórmulas de integrador discreto de los menús Integral Formula y Derivative Formula.
Para obtener más información sobre las fórmulas de integrador discreto, consulte las páginas de referencia de pid, pid2, pidstd y pidstd2.
Forma del controlador PID
Cuando utiliza la entrada type para pidTuner, PID Tuner diseña un controlador de forma paralela. Para diseñar un controlador de forma estándar, utilice uno de los siguientes métodos:
Proporcione un controlador de referencia de forma estándar
Cbaseal comando de iniciopidTuner. PID Tuner diseña un controlador con la misma forma queCbase.Utilice el menú Form para cambiar la forma del controlador después de iniciar PID Tuner.
Para obtener más información sobre las formas de controlador paralela y estándar, consulte las páginas de referencia de pid, pid2, pidstd y pidstd2.