pidTuner
Abra PID Tuner para ajustar los PID
Descripción
pidTuner( inicia PID Tuner con un controlador de referencia sys,Cbase)Cbase para que pueda comparar el rendimiento entre el controlador diseñado y el controlador de referencia. Si Cbase es un objeto de controlador pid, pidstd, pid2 o pidstd2, PID Tuner diseña un controlador con la misma forma, tipo y fórmulas de integrador discreto que Cbase.
pidTuner( diseña un controlador PI de forma paralela.sys)
pidTuner inicia PID Tuner con la planta predeterminada de 1 y el controlador (P) proporcional de 1.
Ejemplos
Argumentos de entrada
Modelo de planta para diseño del controlador, especificado como una de las siguientes opciones.
Cualquier modelo lineal SISO System Identification Toolbox™ (
idtf(System Identification Toolbox),idfrd(System Identification Toolbox),idgrey(System Identification Toolbox),idpoly(System Identification Toolbox),idproc(System Identification Toolbox) oidss(System Identification Toolbox)).Un modelo en tiempo continuo o discreto.
Estable, inestable o integrador. Sin embargo, es posible que no consiga estabilizar una planta con polos inestables en un control PID.
Un modelo que incluye cualquier tipo de retardo de tiempo. Sin embargo, una planta con grandes retardos de tiempo podría no alcanzar un rendimiento adecuado en un control PID.
Si la planta tiene polos inestables y sys es uno de los siguientes:
Un modelo
frdUn modelo
sscon retardos de tiempo internos que no pueden convertirse a retardos de E/S
debe especificar el número de polos inestables de la planta. Para ello, después de abrir PID Tuner, en el menú Plant, seleccione 
Import. En el cuadro de diálogo Import Linear System, vuelva a importar sys especificando el número de polos inestables donde se solicite.
Tipo de controlador que se desea diseñar, especificado como un vector de caracteres. El término tipo de controlador se refiere a qué términos están presentes en la acción del controlador. Por ejemplo, un controlador PI solo tiene un término proporcional y un término integral, mientras que un controlador PIDF contiene términos proporcionales, integradores y derivativos filtrados. type puede tomar los valores que se resumen a continuación. Para obtener más información acerca de estos tipos de controladores, consulte PID Controller Types for Tuning.
Controladores de 1-DOF
'P': solo proporcional'I': solo integral'PI': proporcional e integral'PD': proporcional y derivativo'PDF': proporcional y derivativo con filtro de primer orden en el término derivativo'PID': proporcional, integral y derivativo'PIDF': proporcional, integral y derivativo con filtro de primer orden en el término derivativo
Controladores de 2-DOF
'PI2': proporcional e integral de 2-DOF'PD2': proporcional y derivativo de 2-DOF'PDF2': proporcional y derivativo de 2-DOF con filtro de primer orden en el término derivativo'PID2': proporcional, integral y derivativo de 2-DOF'PIDF2': proporcional, integral y derivativo de 2-DOF con filtro de primer orden en el término derivativo
Para más información sobre los controladores PID de 2-DOF en general, consulte Controladores PID de dos grados de libertad.
Controladores de 2-DOF con pesos de referencia fijos
'I-PD': PID de 2-DOF con b = 0, c = 0'I-PDF': PIDF de 2-DOF con b = 0, c = 0'ID-P': PID de 2-DOF con b = 0, c = 1'IDF-P': PIDF de 2-DOF con b = 0, c = 1'PI-D': PID de 2-DOF con b = 1, c = 0'PI-DF': PIDF de 2-DOF con b = 1, c = 0
Para información más detallada acerca de los controladores PID de 2-DOF con pesos de puntos de referencia fijos, consulte PID Controller Types for Tuning.
Forma del controlador
Cuando utiliza la entrada type, PID Tuner diseña un controlador de forma paralela. Si desea diseñar un controlador de forma estándar, use la entrada Cbase en lugar de type o seleccione Standard en el menú Form. Para obtener más información sobre las formas paralela y estándar, consulte las páginas de referencia de pid y pidstd.
Si sys es un modelo en tiempo discreto con un tiempo de muestreo Ts, PID Tuner diseña un controlador pid en tiempo discreto usando la fórmula de integrador discreto ForwardEuler. Para diseñar un controlador que tenga una fórmula de integrador discreto diferente:
Use el argumento de entrada
Cbaseen lugar detype. PID Tuner lee el tipo de controlador, la forma y las fórmulas de integrador discreto del controlador de referenciaCbase.En PID Tuner, haga clic en Options para abrir el cuadro de diálogo Controller Options. Seleccione fórmulas de integrador discreto de los menús Integral Formula y Derivative Formula.
Para obtener más información sobre las fórmulas de integrador discreto, consulte las páginas de referencia de pid y pidstd.
Sistema dinámico que representa un controlador de referencia y permite comparar el rendimiento del controlador diseñado con el rendimiento de Cbase.
Si Cbase es un objeto pid o pidstd, PID Tuner también lo usa para configurar el tipo, la forma y las fórmulas de integrador discreto del controlador diseñado. El controlador diseñado:
Es del tipo representado por
Cbase.Es un controlador de forma paralela si
Cbasees un objeto de controladorpid.Es un controlador de forma estándar si
Cbasees un objeto de controladorpidstd.Es un controlador de forma paralela de 2-DOF si
Cbasees un objeto de controladorpid2.Es un controlador de forma estándar de 2-DOF si
Cbasees un objeto de controladorpidstd2.Tiene los mismos valores
IformulayDformulaqueCbase. Para obtener más información sobreIformulayDformula, consulte las páginas de referencia depidypidstd.
Si Cbase es otro tipo de sistema dinámico, PID Tuner diseña un controlador PI de forma paralela. Puede cambiar la forma y el tipo del controlador usando los menús Form y Type después de iniciar PID Tuner.
Sugerencias
Si
typeoCbaseespecifica un controlador PID de un grado de libertad (1-DOF),pidTunerdiseña un controlador para el lazo de retroalimentación unitario como se ilustra a continuación:
Si
typeoCbaseespecifica un controlador PID de dos grados de libertad (2-DOF),pidTunerdiseña un controlador de 2-DOF como en el lazo de retroalimentación de la siguiente ilustración: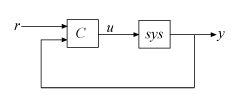
PID Tuner tiene un margen de fase objetivo predeterminado de 60 grados y ajusta automáticamente las ganancias PID para equilibrar el rendimiento (tiempo de respuesta) y la robustez (márgenes de estabilidad). Use los controles deslizantes Response time o Bandwidth, y Phase Margin para ajustar el rendimiento del controlador a los requisitos. Aumentar el rendimiento suele disminuir la robustez y viceversa.
Seleccione gráficas de respuesta del menú Response para analizar el rendimiento del controlador.
Si proporciona
Cbase, marque Show baseline para mostrar la respuesta del controlador de referencia.Para obtener más información acerca de cómo usar PID Tuner, consulte Diseñar controladores PID con PID Tuner.
Para realizar un ajuste interactivo del PID en Live Editor, consulte la tarea Tune PID Controller de Live Editor. Esta tarea permite diseñar un controlador PID de forma interactiva y genera automáticamente código de MATLAB® para un script en vivo.
Algoritmos
Para más información sobre el algoritmo de ajuste PID de MathWorks®, consulte Algoritmo de ajuste PID.
Alternativas
Puede abrir PID Tuner desde MATLAB desktop, en la pestaña Apps. Después, use el menú Plant de PID Tuner para especificar el modelo de planta.
Para ajustar el PID en la línea de comandos, utilice pidtune. El comando pidtune puede diseñar un controlador para múltiples plantas al mismo tiempo.
Para realizar un ajuste interactivo del PID en Live Editor, consulte la tarea Tune PID Controller de Live Editor. Esta tarea permite diseñar un controlador PID de forma interactiva y genera automáticamente código de MATLAB para un script en vivo.
Historial de versiones
Introducido en R2014b