c2d
Conversión de modelos en tiempo continuo a discreto
Descripción
sysd = c2d(sysc,Ts)sysc utilizando una retención de orden cero en las entradas y un tiempo de muestreo de Ts.
Ejemplos
Discretice la siguiente función de transferencia en tiempo continuo:
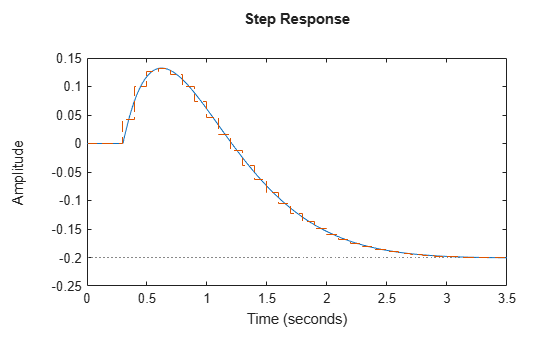
Este sistema tiene un retardo de entrada de 0,3 s. Discretice el sistema utilizando la aproximación triangular (retención de primer orden) con tiempo de muestreo Ts = 0,1 s.
H = tf([1 -1],[1 4 5],'InputDelay', 0.3); Hd = c2d(H,0.1,'foh');
Compare las respuestas al escalón de los sistemas en tiempo continuo y discretizado.
step(H,'-',Hd,'--')
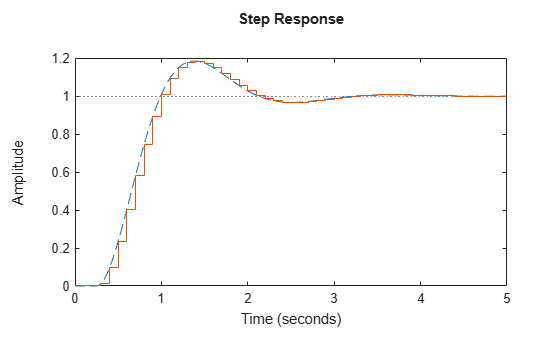
Discretice la siguiente función de transferencia con retardo utilizando una retención de orden cero en la entrada y una tasa de muestreo de 10 Hz.
h = tf(10,[1 3 10],'IODelay',0.25);
hd = c2d(h,0.1)hd =
0.01187 z^2 + 0.06408 z + 0.009721
z^(-3) * ----------------------------------
z^2 - 1.655 z + 0.7408
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
En este ejemplo, el modelo discretizado hd presenta un retardo de tres periodos de muestreo. El algoritmo de discretización absorbe el retardo de medio periodo residual en los coeficientes de hd.
Compare las respuestas al escalón de los modelos en tiempo continuo y discretizado.
step(h,'--',hd,'-')
Desde R2024a
Cree un modelo en espacio de estados en tiempo continuo con dos estados y un retardo de entrada.
sys = ss(tf([1,2],[1,4,2])); sys.InputDelay = 2.7
sys =
A =
x1 x2
x1 -4 -2
x2 1 0
B =
u1
x1 2
x2 0
C =
x1 x2
y1 0.5 1
D =
u1
y1 0
Input delays (seconds): 2.7
Continuous-time state-space model.
Model Properties
Discretice el modelo utilizando el método de discretización de Tustin y un filtro de Thiran para crear el modelo de los retardos fraccionarios. Tiempo de muestreo Ts = 1 segundo.
opt = c2dOptions('Method','tustin','ThiranOrder',3); sysd1 = c2d(sys,1,opt)
sysd1 =
A =
x1 x2
x1 -0.4286 -0.5714
x2 0.2857 0.7143
B =
u1
x1 0.5714
x2 0.2857
C =
x1 x2
y1 0.2857 0.7143
D =
u1
y1 0.2857
(values computed with all internal delays set to zero)
Internal delays (sampling periods): 1 1 1
Sample time: 1 seconds
Discrete-time state-space model.
Model Properties
De forma predeterminada, la función modela retardos adicionales como retardos internos en el modelo discretizado. Para modelar retardos adicionales como estados en el modelo discretizado, establezca la opción DelayModeling de c2dOptions en 'state'.
opt2 = c2dOptions('Method','tustin','ThiranOrder',3,'DelayModeling','state'); sysd2 = c2d(sys,1,opt2)
sysd2 =
A =
x1 x2 x3 x4 x5
x1 -0.4286 -0.5714 -0.00265 0.06954 2.286
x2 0.2857 0.7143 -0.001325 0.03477 1.143
x3 0 0 -0.2432 0.1449 -0.1153
x4 0 0 0.25 0 0
x5 0 0 0 0.125 0
B =
u1
x1 0.002058
x2 0.001029
x3 8
x4 0
x5 0
C =
x1 x2 x3 x4 x5
y1 0.2857 0.7143 -0.001325 0.03477 1.143
D =
u1
y1 0.001029
Sample time: 1 seconds
Discrete-time state-space model.
Model Properties
El modelo discretizado contiene ahora tres estados adicionales x3, x4 y x5, correspondientes a un filtro de Thiran de tercer orden. Dado que el retardo de tiempo dividido por el tiempo de muestreo es 2,7, el filtro de Thiran de tercer orden ('ThiranOrder' = 3) puede aproximar la totalidad del retardo de tiempo.
Realice la estimación de una función de transferencia en tiempo continuo y proceda a su discretización.
load iddata1 sys1c = tfest(z1,2); sys1d = c2d(sys1c,0.1,'zoh');
Realice la estimación de una función de transferencia en tiempo discreto de segundo orden.
sys2d = tfest(z1,2,'Ts',0.1);Compare la respuesta del modelo discretizado de función de transferencia en tiempo continuo, sys1d, y del modelo en tiempo discreto estimado directamente, sys2d.
compare(z1,sys1d,sys2d)

Los dos sistemas son casi idénticos.
Discretice un modelo en espacio de estados identificado para construir un predictor de un paso adelante de su respuesta.
Cree un modelo en espacio de estados en tiempo continuo identificado utilizando datos de estimación.
load iddata2
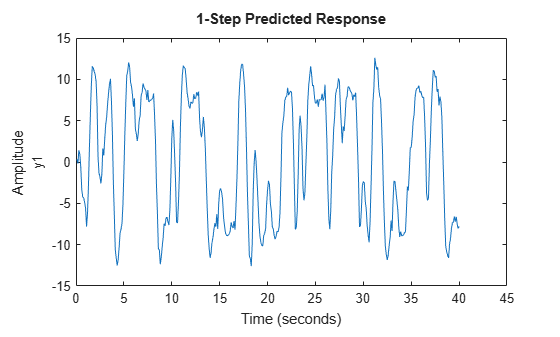
sysc = ssest(z2,4);Anticipe la respuesta prevista de un paso adelante de sysc.
predict(sysc,z2)
Discretice el modelo.
sysd = c2d(sysc,0.1,'zoh');Construya un modelo de predicción a partir del modelo discretizado, sysd.
[A,B,C,D,K] = idssdata(sysd); Predictor = ss(A-K*C,[K B-K*D],C,[0 D],0.1);
Predictor es un modelo de dos entradas que utiliza las señales de salida y entrada ([z1.y z1.u]) medidas para calcular la respuesta prevista de un paso de sysc.
Simule el modelo de predicción para obtener la misma respuesta que el comando predict.
lsim(Predictor,[z2.y,z2.u])
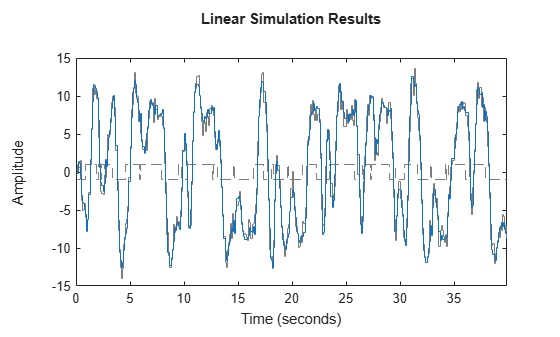
La simulación del modelo de predicción genera la misma respuesta que predict(sysc,z2).
Argumentos de entrada
Argumentos de salida
Historial de versiones
Introducido antes de R2006aConsulte también
c2dOptions | d2c | d2d | thiran | translatecov (System Identification Toolbox) | Convert Model Rate