parallel
Conexión paralela de dos modelos
Sintaxis
Descripción
sys = parallel(sys1,sys2)sys1 y sys2 y sumando las salidas, tal como se muestra en el diagrama.
Este comando equivale a la multiplicación directa sys = sys1 + sys2. En el caso de los sistemas MIMO, sys2 y sys2 deben tener el mismo número de entradas y salidas.
sys = parallel(sys1,sys2,in1,in2,out1,out2)
Los vectores in1 e 1n2 contienen índices a las entradas de sys1 y sys2 que reciben las entradas u. Del mismo modo, out1 y out2 son vectores que especifican las salidas de sys1 y sys2, que se suman para formar las salidas y. El sys resultante tiene entradas [v1,u,v2], donde v1 y v2 son las entradas no especificadas en in1 e 1n2. Del mismo modo, sys tiene salidas [z1,y,z2], donde z1 y z2 son las salidas no especificadas en out1 y out2.
Ejemplos
Cree dos sistemas SISO, siendo uno de ellos un modelo en espacio de estados y el otro una función de transferencia.
sys1 = rss(3); sys2 = tf(1,[1 1 1]);
Forme la interconexión en paralelo de los dos sistemas y examine el modelo resultante.
sys = parallel(sys1,sys2); size(sys)
State-space model with 1 outputs, 1 inputs, and 5 states.
Al conectar una función de transferencia con un modelo en espacio de estados se obtiene otro modelo en espacio de estados. Para obtener más información sobre los resultados de combinar distintos tipos de modelos, consulte Rules That Determine Model Type.
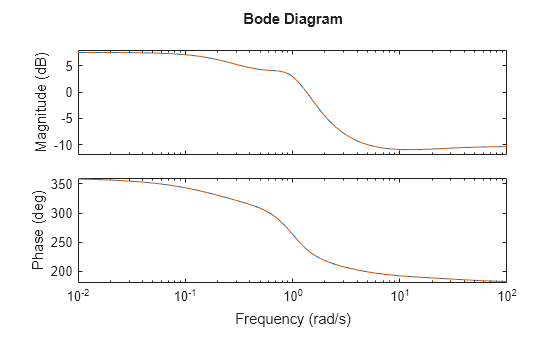
La interconexión en paralelo equivale a la suma aritmética de los dos modelos. Compruebe esta equivalencia examinando las respuestas en frecuencia.
sysa = sys1 + sys2; bodeplot(sys,'-',sysa,'--')
Conecte dos sistemas MIMO en paralelo. Cuando los dos sistemas tienen las mismas dimensiones de entrada-salida, se pueden conectar todas las entradas y salidas. Por ejemplo, cree dos sistemas de tres salidas y dos entradas, y forme esta interconexión.
sys1 = rss(4,3,2); sys2 = rss(4,3,2); sys = parallel(sys1,sys2);
El modelo resultante tiene las mismas dimensiones de entrada-salida.
size(sys)
State-space model with 3 outputs, 2 inputs, and 8 states.
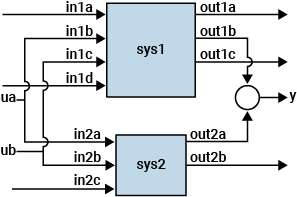
Puede establecer conexiones en paralelo asignando nombres que coincidan con las señales que desea conectar. Partiendo del sistema de tres salidas y cuatro entradas sys1 y del sistema de dos salidas y tres entradas sys2, forme la conexión en paralelo que se muestra en el diagrama.
Cree modelos en espacio de estados de los dos sistemas y asigne un nombre a las señales de entrada y salida.
% sys1: 3-output, 4-input sys1 = rss(4,3,4); sys1.InputName = ["in1a","in1b","in1c","in1d"]; sys1.OutputName = ["out1a","out1b","out1c"]; % sys2: 2-output, 3-input sys2 = rss(3,2,3); sys2.InputName = ["in2a","in2b","in2c"]; sys2.OutputName = ["out2a","out2b"];
En la interconexión que se muestra en el diagrama, las entradas 2 y 3 de sys1 se conectan a las entradas 1 y 2 de sys2, respectivamente. El diagrama también muestra que la segunda salida de sys1 se suma a la primera salida de sys2. Cambie los nombres de las señales para que coincidan los nombres de las señales de conexión.
sys1.InputName = ["in1a","u1","u2","in1d"]; sys1.OutputName = ["out1a","y1","out1c"]; sys2.InputName = ["u1","u2","in2c"]; sys2.OutputName = ["y1","out2b"];
Establezca la conexión usando el indicador name.
sys = parallel(sys1,sys2,"name");Examine las dimensiones, entradas y salidas de sys para confirmar que las conexiones coinciden con las del diagrama.
size(sys)
State-space model with 4 outputs, 5 inputs, and 7 states.
sys.InputName
ans = 5×1 cell
{'in1a'}
{'in1d'}
{'u1' }
{'u2' }
{'in2c'}
sys.OutputName
ans = 4×1 cell
{'out1a'}
{'out1c'}
{'y1' }
{'out2b'}
Puede establecer interconexiones en paralelo con un subconjunto de entradas y salidas del modelo especificando los índices de las señales que desea conectar. Partiendo del sistema de tres salidas y cuatro entradas sys1 y del sistema de dos salidas y tres entradas sys2, forme la conexión en paralelo que se muestra en el diagrama.

Cree modelos en espacio de estados de los dos sistemas.
% sys1: 3-output, 4-input sys1 = rss(4,3,4); % sys2: 2-output, 3-input sys2 = rss(3,2,3);
Para establecer la interconexión, cree vectores que especifiquen las entradas y salidas de cada modelo que desea conectar. Por ejemplo, tal y como se muestra en el diagrama, las entradas 2 y 3 de sys1 se conectan a las entradas 1 y 2 de sys2, respectivamente. Por lo tanto, especifique los índices de entrada de la siguiente manera.
inp1 = [2 3]; % indices of in1b and in1c inp2 = [1 2]; % indices of in2a and in2b
El diagrama también muestra que la segunda salida de sys1 se suma a la primera salida de sys2.
out1 = [2]; % index of out1b out2 = [1]; % index of out2a
Use estos valores para establecer la interconexión en paralelo.
sys = parallel(sys1,sys2,inp1,inp2,out1,out2);
El modelo resultante tiene cuatro salidas y cinco entradas, como se esperaba.
size(sys)
State-space model with 4 outputs, 5 inputs, and 7 states.
Argumentos de entrada
Argumentos de salida
Historial de versiones
Introducido antes de R2006a