activecontour
Segmentar una imagen para separar el primer plano y el fondo mediante la técnica de crecimiento regional de contornos activos (snakes)
Sintaxis
Descripción
La técnica de contornos activos, también llamada snakes, es un algoritmo iterativo de segmentación de imágenes por regiones. Mediante el algoritmo de contornos activos, se especifican curvas iniciales en una imagen y, a continuación, se utiliza la función activecontour para hacer evolucionar las curvas hacia los límites del objeto.
BW = activecontour(A,mask)A en regiones de primer plano (objeto) y de fondo mediante contornos activos.
El argumento mask es una imagen binaria que especifica el estado inicial del contorno activo. Los límites de las regiones del objeto (blanco) en mask definen la posición inicial del contorno utilizada para evolucionarlo con el fin de segmentar la imagen. La imagen de salida BW es una imagen binaria en la que el primer plano es blanco (true lógico) y el fondo es negro (false lógico).
Para obtener resultados de segmentación más rápidos y precisos, especifique una posición inicial del contorno cercana a los límites del objeto deseado.
BW = activecontour(___,Name=Value)
Ejemplos
Lea una imagen en escala de grises y muéstrela.
I = imread('coins.png'); imshow(I) title('Original Image')

Especifique un contorno inicial que rodee los objetos de interés. Muestre el contorno.
mask = zeros(size(I));
mask(25:end-25,25:end-25) = 1;
imshow(mask)
title('Initial Contour Location')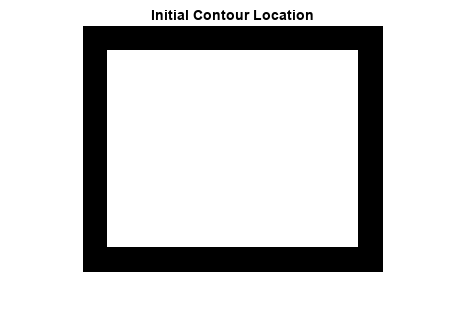
Segmente la imagen usando la función activecontour. De forma predeterminada, la función evoluciona la segmentación durante 100 iteraciones.
bw = activecontour(I,mask);
Muestre el resultado. Después de 100 iteraciones, los objetos no están completamente segmentados del fondo porque el contorno original no está cerca de los límites del objeto.
imshow(bw)
title('Segmented Image, 100 Iterations')
Para seguir evolucionando la segmentación, aumente el número de iteraciones. Después de 300 iteraciones, los objetos están completamente segmentados del fondo.
bw = activecontour(I,mask,300);
imshow(bw)
title('Segmented Image, 300 Iterations')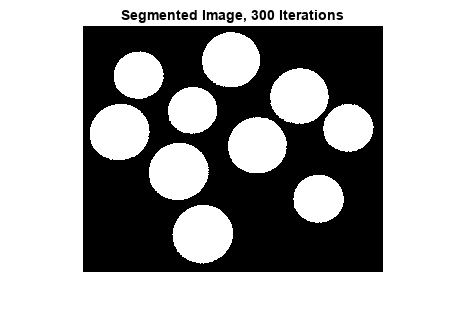
Lea una imagen en escala de grises y muéstrela.
I = imread('toyobjects.png');
imshow(I)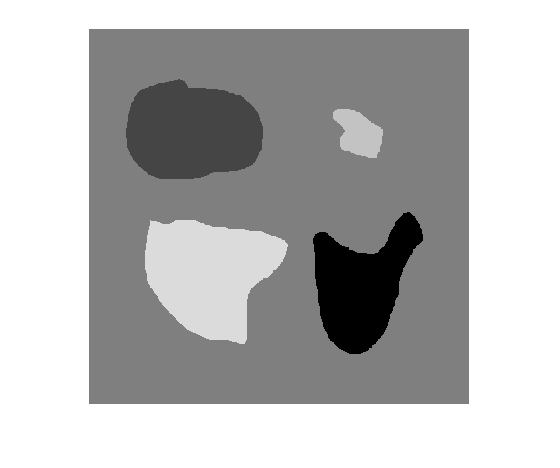
Dibuje un contorno inicial cerca del objeto de interés usando la función drawrectangle. Después de dibujar el contorno, cree una máscara con la función createMask.
r = drawrectangle;
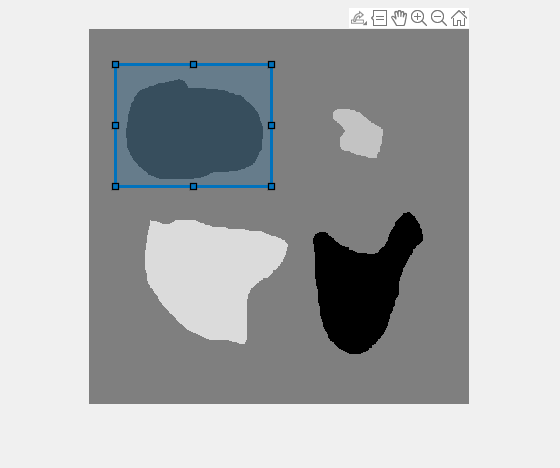
mask = createMask(r);
Segmente la imagen usando el método 'edge' y 200 iteraciones.
bw = activecontour(I,mask,200,'edge');Muestre el contorno final sobre la imagen original en rojo.
hold on; visboundaries(bw,'Color','r');

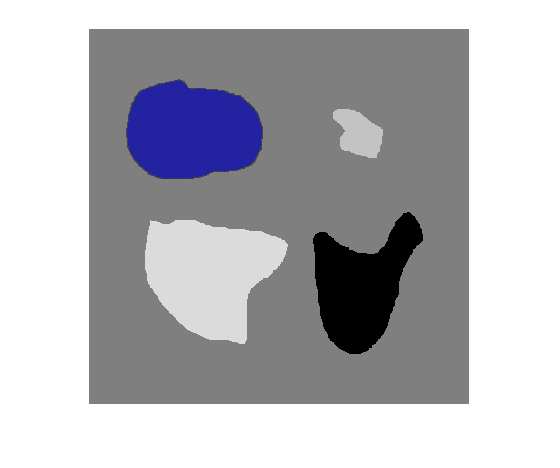
Muestre el resultado de la segmentación sobre la imagen original. El objeto que aparece en primer plano es de color azul.
figure imshow(labeloverlay(I,bw));
Cargue los datos de las imágenes volumétricas en 3D y elimine la dimensión singleton.
D = load('mri.mat');
A = squeeze(D.D);Cree una máscara 2D para los puntos semilla iniciales.
seedLevel = 10; seed = A(:,:,seedLevel) > 75; figure imshow(seed)

Cree una máscara semilla 3D vacía y coloque en ella los puntos semilla.
mask = zeros(size(A)); mask(:,:,seedLevel) = seed;
Realice la segmentación usando contornos activos, especificando la máscara semilla.
bw = activecontour(A,mask,300);
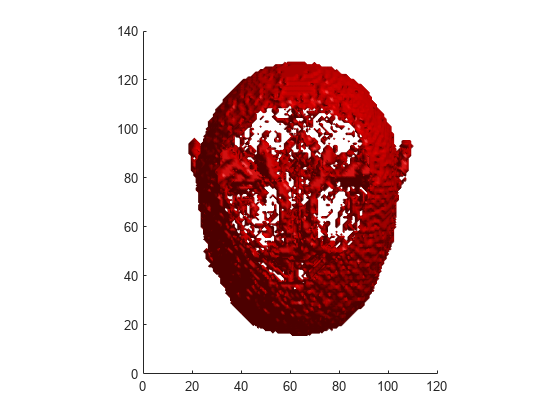
Muestre la imagen 3D segmentada.
figure; p = patch(isosurface(double(bw))); p.FaceColor = 'red'; p.EdgeColor = 'none'; daspect([1 1 27/128]); camlight; lighting phong
Argumentos de entrada
Argumentos de par nombre-valor
Argumentos de salida
Sugerencias
activecontourutiliza los límites de las regiones demaskcomo estado inicial del contorno a partir del cual empieza la evolución. La existencia de huecos en la máscara puede causar resultados impredecibles. Utiliceimfillpara rellenar los huecos que haya en las regiones demask.Si una región toca los bordes de la imagen,
activecontourelimina una capa de un solo píxel de la región, antes de seguir procesándola, para que la región no toque el borde de la imagen.Para obtener resultados más rápidos y precisos, especifique una posición inicial del contorno que esté cerca de los límites deseados del objeto, especialmente en el caso del método
"edge".En el método
"edge", el contorno activo está sesgado a encogerse hacia el interior (contraerse). Si no hay ningún gradiente en la imagen, el contorno activo se encoge por sí solo. Por el contrario, con el método"Chan-Vese", en el que no está sesgado, el contorno es libre de contraerse o expandirse en función de las características de la imagen.Para lograr una segmentación precisa con el método
"edge", especifique un contorno inicial que se encuentre fuera de los límites del objeto. El contorno activo con el método"edge"está sesgado a encogerse de forma predeterminada.Si las regiones de los objetos tienen intensidades de escala de grises significativamente diferentes, es posible que el método
"Chan-Vese"[1] no segmente todos los objetos de la imagen. Por ejemplo, si la imagen contiene objetos más claros que el fondo y otros más oscuros, el método"Chan-Vese"suele segmentar bien los objetos oscuros, bien los brillantes únicamente.
Algoritmos
activecontour utiliza el método Sparse-Field level-set, similar al método descrito en [3], para implementar la evolución activa del contorno.
Referencias
[1] T. F. Chan, L. A. Vese, Active contours without edges. IEEE Transactions on Image Processing, Volume 10, Issue 2, pp. 266-277, 2001.
[2] V. Caselles, R. Kimmel, G. Sapiro, Geodesic active contours. International Journal of Computer Vision, Volume 22, Issue 1, pp. 61-79, 1997.
[3] R. T. Whitaker, A level-set approach to 3d reconstruction from range data. International Journal of Computer Vision, Volume 29, Issue 3, pp. 203-231, 1998.
Capacidades ampliadas
Historial de versiones
Introducido en R2013aConsulte también
Image Segmenter | multithresh | poly2mask | roipoly | drawfreehand | drawellipse | drawpolygon